
電通大杯 ヒト型レスキューロボットコンテスト 2013 公式レポート
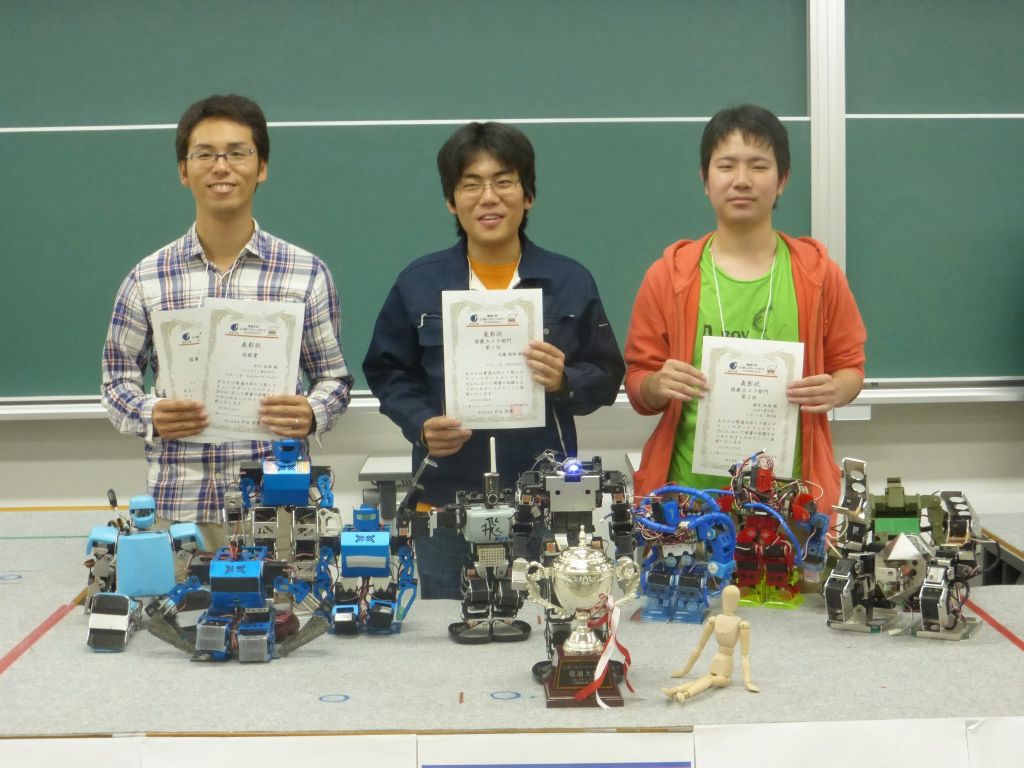
2013年11月3日に大阪電気通信大学駅前キャンパスで「電通大杯 ヒト型レスキューロボットコンテスト 2013」(以下、ヒト型レスコン)が開催された。ヒト型ロボットによる災害救助をテーマにしたロボットコンテストである。今年で5回目の開催となり、レスキューを行うために様々な工夫を凝らしたヒト型ロボット13体がエントリし、実際には10体が参加した(画像1)。今年から2部門制となり、搭載カメラ部門と目視部門の部門ごとの表彰と総合ポイントで決まる電通大杯が設けられた。搭載カメラ部門の第1位はzeno氏の操縦するロボット「RB2000SF」(画像2)、目視部門の第1位は、近藤氏の操作するロボット「大電通コマドリー改」となった(画像3)。また、近藤氏の「大電通コマドリー改」には電通大杯も贈られた。会場来られた観客には小さな子供連れの家族も多く、ヒト型ロボットが行うレスキュー活動に対して声援と拍手を送っていた。

画像1:電通大杯 ヒト型レスキューロボットコンテスト2013集合記念写真

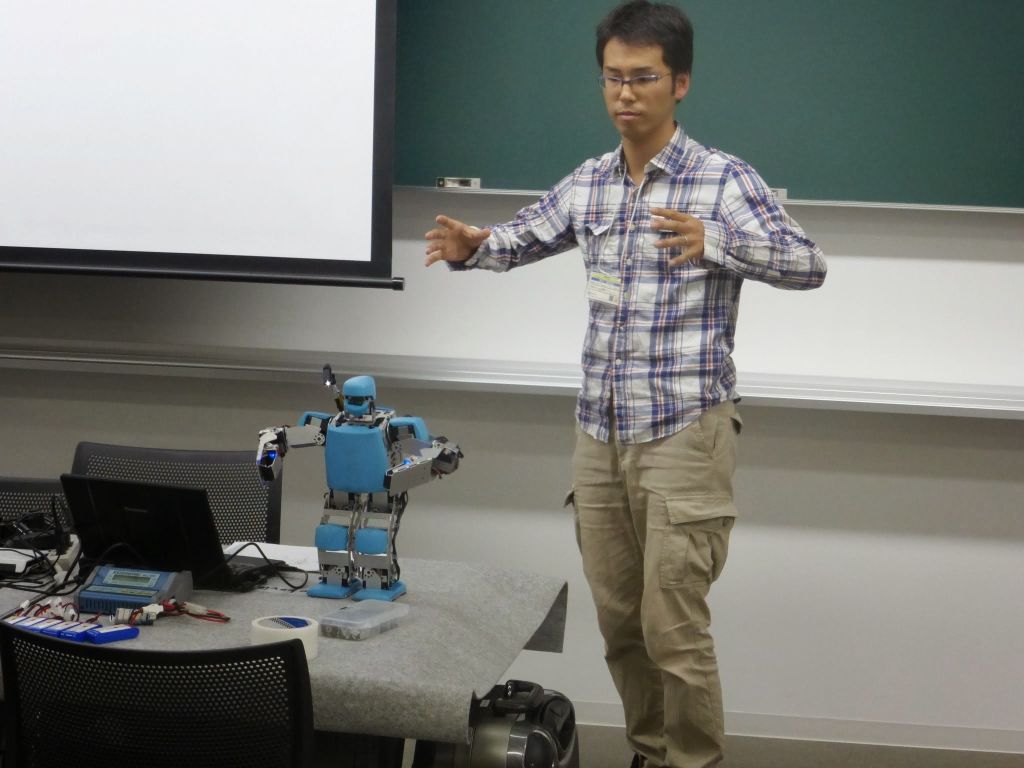
画像2:搭載カメラ部門第1位のzeno氏と「RB2000SF」

画像3:電通大杯ならび目視部門第1位の近藤氏
競技の概要
ヒト型レスコンは、ロボット1台と操縦者1人でも気軽に参加できるレスキューロボットコンテストとして2009年からスタートした。本家のレスキューロボットコンテストは、コンテストを通して災害やレスキューロボットに対する技術や考え方を学ぶことで、将来の災害に強い世の中を目指し2000年より神戸で毎年開催されている。本家では、半年以上の準備をして、10人ほどで構成されるチームが複数台のロボットを用いて競技を行うのに対して、短期間の準備で1人でも気軽に参加できるのがヒト型レスコンの特徴である。
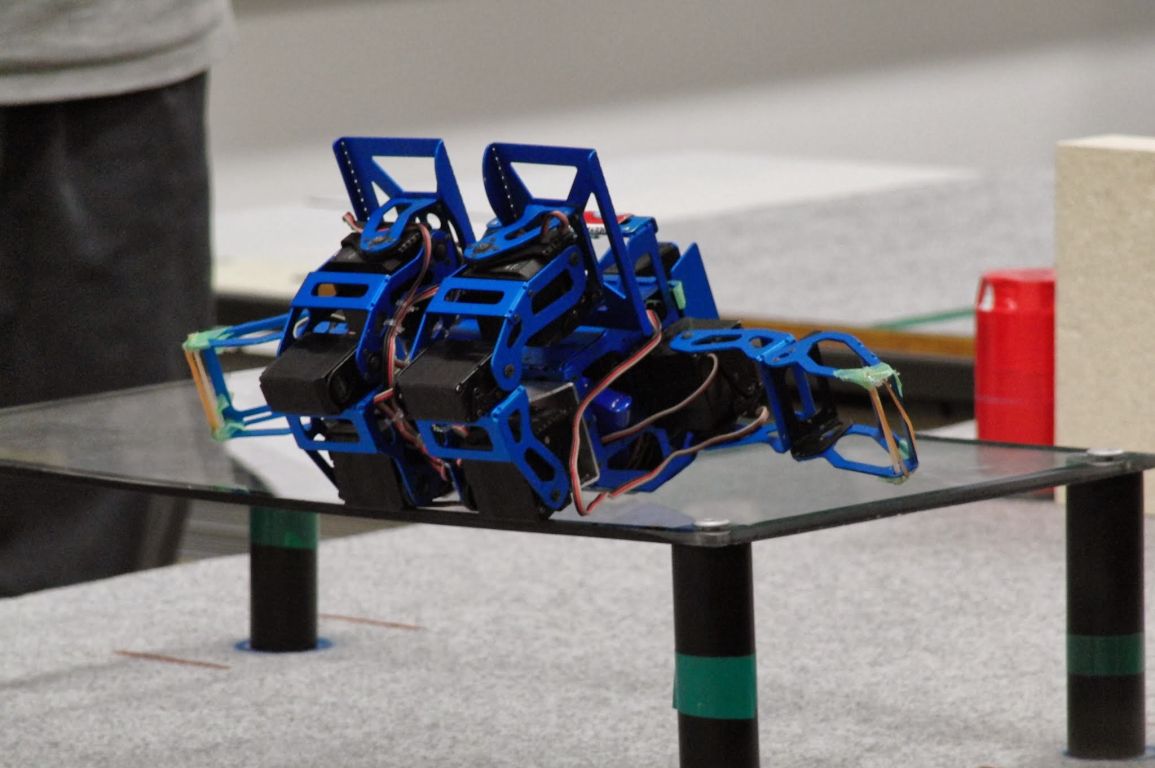
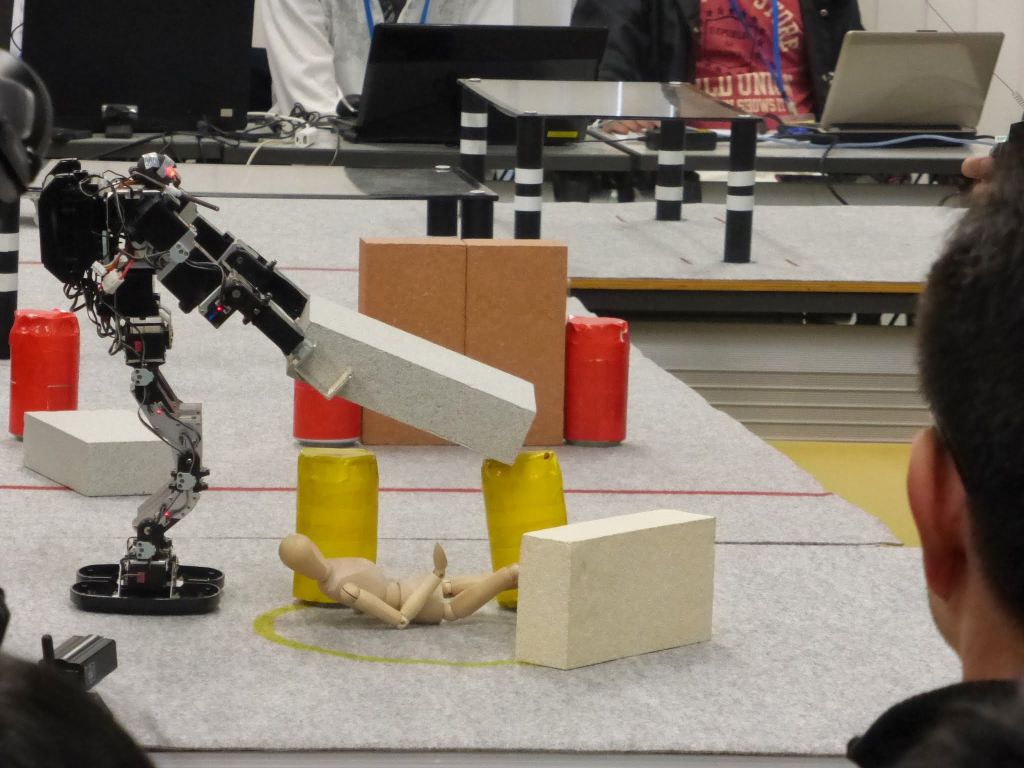
コンテストでは、被災地を模した約4×2mのフィールド内で「トンネルくぐり」「段差乗り越え」「ガレキ除去」「要救助者搬送」の4つのタスクを順にクリアし、要救助者の搬送が完了した残り時間と審査員ポイントの合計を競う。競技の行われるフィールドには、操縦者を囲むようにコの字にコースが作られ、全面に薄いパンチカーペットが敷かれている(画像4、画像5、画像6)。操縦者は、遠隔操作でヒト型ロボットを操作し要救助者役のデッサン人形を救助する。しかし、単に人形を早く拾い上げゴールラインに向かえばいいというものではなく、要救助者を「安全に」扱えているか、「やさしく」救助できているかといったことも審査対象となり、採点が行われる。
今年から要救助者周りの救助エリアが正方形から円形に変更された。また、従来のレンガガレキ(発泡スチロール製)の他に、新しく「ドラム缶ガレキ」と呼ばれるガレキが追加された。これは、空の350mLのアルミ缶である。さらに、フィールドに新しい障害として「段差乗り越え」の後の通り道にガレキが積み上げられるようになった。
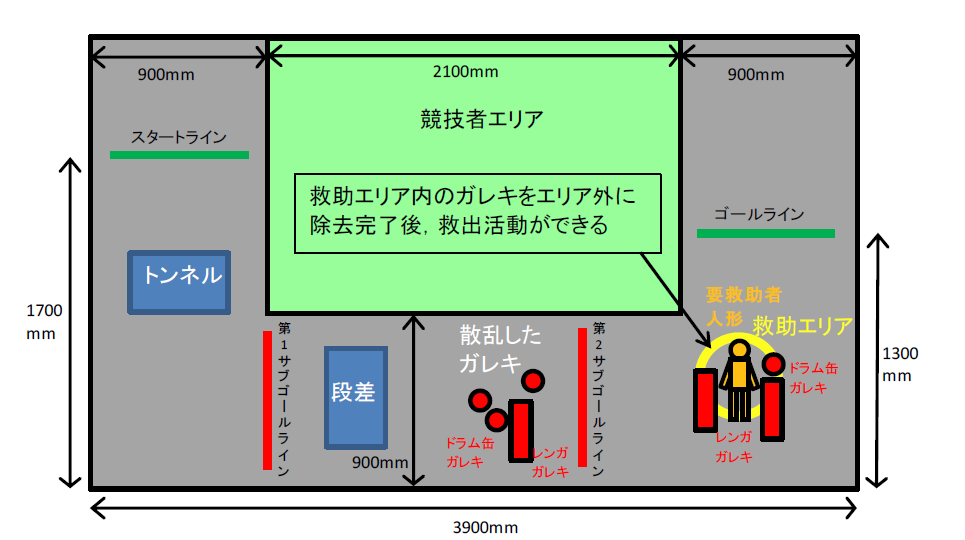
画像4: 競技フィールドの上面図

画像5: フィールド全体。左側からスタートしタスクをクリアして要救助者をゴールへ搬送する。
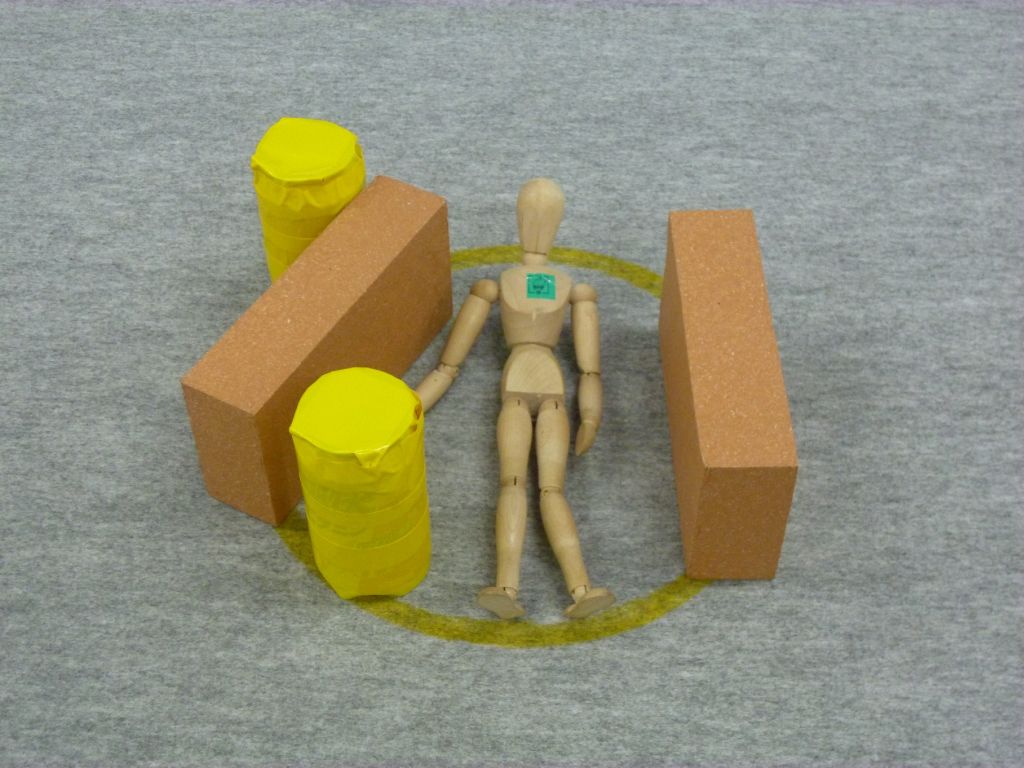
画像6:要救助者を模したデッサン人形。人形はレンガガレキとドラム缶ガレキで囲まれている。
ヒト型レスコンには、市販のホビー用ヒト型ロボットを無改造でも参加できる。ただし、モーション(動きを表現するポーズの組み合わせ)は、市販品に付属のサンプルだけでは全く足りない。歩いたり起き上がったりするだけでなく、様々なタスクに対応したモーションを作成しなければならない。さらに、状況に応じて、臨機応変に動きの切り替えや位置を微調整できることも必要である。例えば、今回電通大杯を受賞した近藤氏の大電通コマドリー改では、20個のモーションを用意してあり、横歩きやゆっくり歩きなど歩行だけでも10個モーションがあるそうだ。それから、操縦の練習も非常に重要だ。ガレキの配置などは、あらかじめわかっていないので、色々な状況を想定して練習しておかなければならないし、その場で臨機応変な対応も必要である。また、操縦を少し間違えるだけで、要救助者にダメージを与える場合もあり、慎重な操縦が求められる。このコンテストに参加するには、ハードウェアを早めに完成させ、モーション作成と操縦練習に日数を十分に取ることが肝要だ。
競技の流れ
競技は、操縦者が要救助者を模した人形を配置するところから始まる。フィールドの救助エリア内であれば、人形のポーズは操縦者が自由に決めることができる(画像7)。その後、審判がランダムにガレキを配置する。ガレキの配置位置は事前にはわからないため、様々な状況を想定したガレキ除去の戦略が求められる。

画像7: 人形のポーズは操縦者が決める(久保田氏/産業技術短期大学)
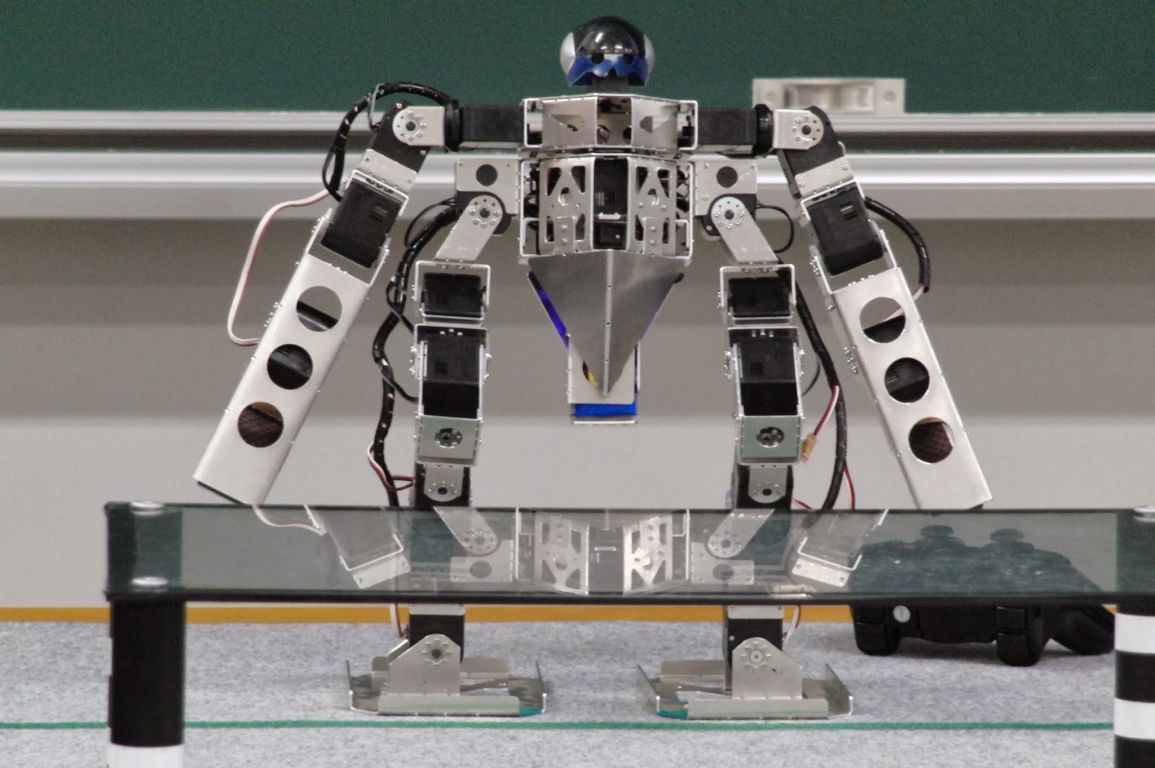
画像8:救助活動開始を待つハトール(E・岡本氏/大阪電気通信大学 自由工房)
これらの設置後、緑のスタートラインにヒト型ロボットを立たせ、競技が始まる(画像8)。最初のタスクはトンネルくぐりだ。トンネルに見立てた机のような形の障害物の下をくぐる。その天板の高さは、事前に競技者がいくつかの中から選択できる。通過する方法は、腕を使っての匍匐前進や、仰向けになって足で前進するなど様々だ(画像9)。興味深い方法だったのが大電通コマドリー改(近藤氏/大阪電気通信大 自由工房)だ。台車を用いて、その上に仰向けに寝そべり巧みに足を動かすことで前進しトンネルを通過した(画像10)。このように、ヒト型レスコンでは、道具を用いることができ、そのアイディアも採点対象となっている。
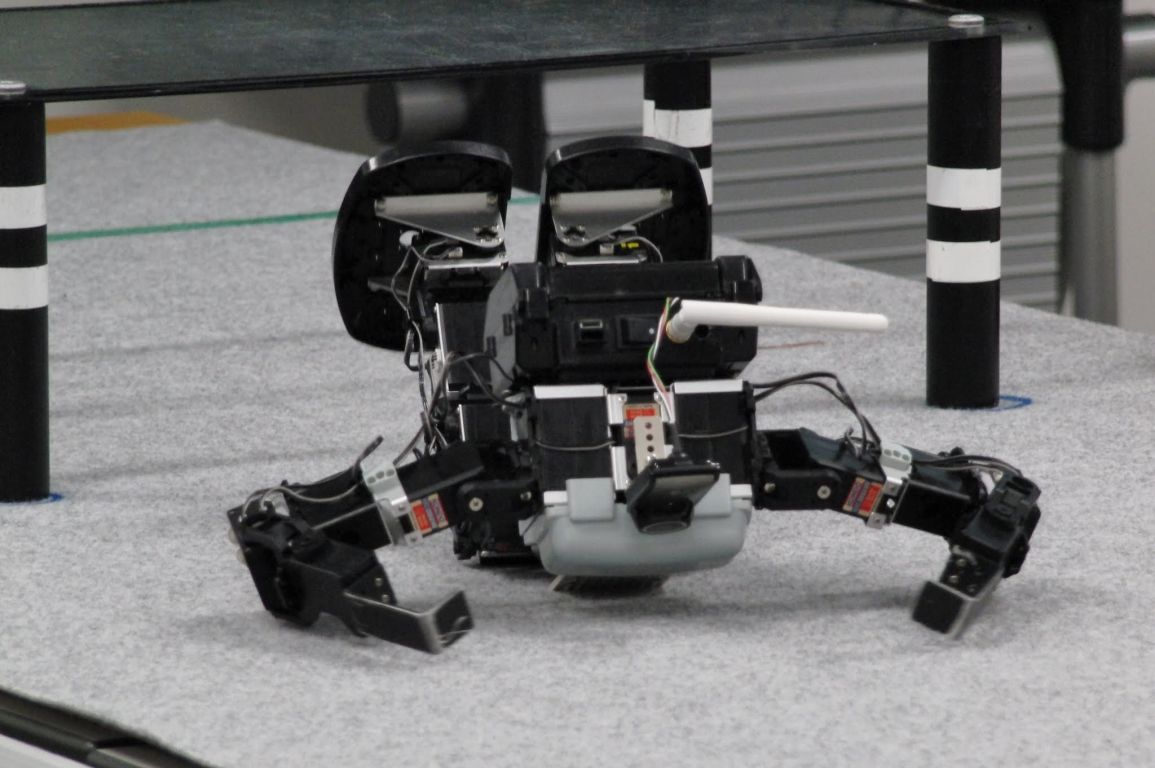
画像9:人間のような匍匐前進を行う飛之助(緒方氏/九州工業大学)

画像10:台車を使って移動する大電通コマドリー改(近藤氏/大阪電気通信大学 自由工房)
次に待ち構えるのが段差乗り越えだ。段差に見立てた障害物は、トンネルくぐりに使ったものと全く同じもので、高さも同じに設定される。つまり、高いトンネルを選んだロボットは、高い段差を越えなければならない。乗り越えのタスクに対して、段差の上で派手に前転をしたり、段差に腰を下ろし徐々に移動したり、足を大きく持ち上げて段差の上で起立したりと、様々な方法が試みられた(画像11、画像12、画像13)。特に、今回他の競技者と違うアプローチだったのは、道具として踏み台を使用した高嶋氏だ(画像14)。
画像11:段差の上で前転するデルタ(中野氏/大阪産業大学ロボットプロジェクト)

画像12:段差の上に腰を乗せて足を使って徐々に移動する大電通コマドリー改
(近藤氏/大阪電気通信大学 自由工房)

画像13:片足を上げて、段差の上に立ち上がり、歩いて越えるRobovie-PC Ver2.0
(今川氏/ヴイストン株式会社)
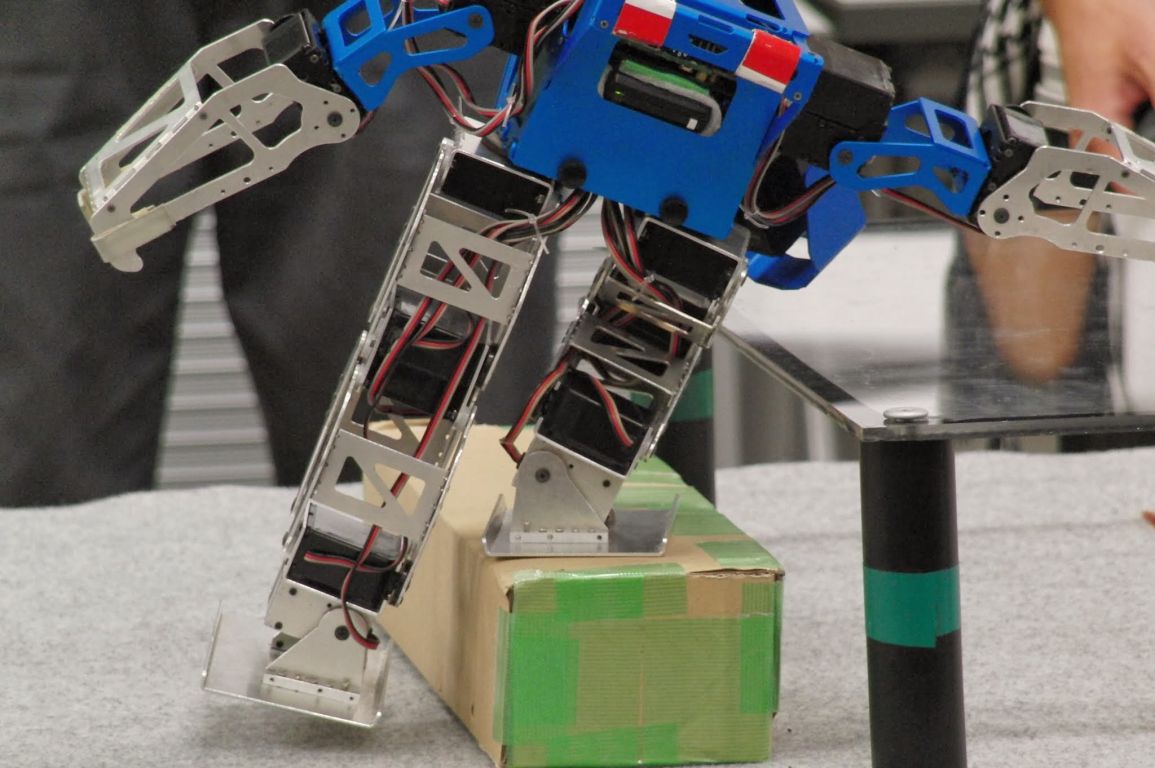
画像14:道具として設置した踏み台を使い段差を越えるレフレグ
(高嶋氏/大阪産業大学 ロボットプロジェクト)
段差を乗り越えた先には、ガレキが道を塞いでいる。これを除去しなければ要救助者がいるエリアに近づくことができない。歩行に必要な道をどのように切り開くか、慎重な操作が要求される。(画像15、画像16)
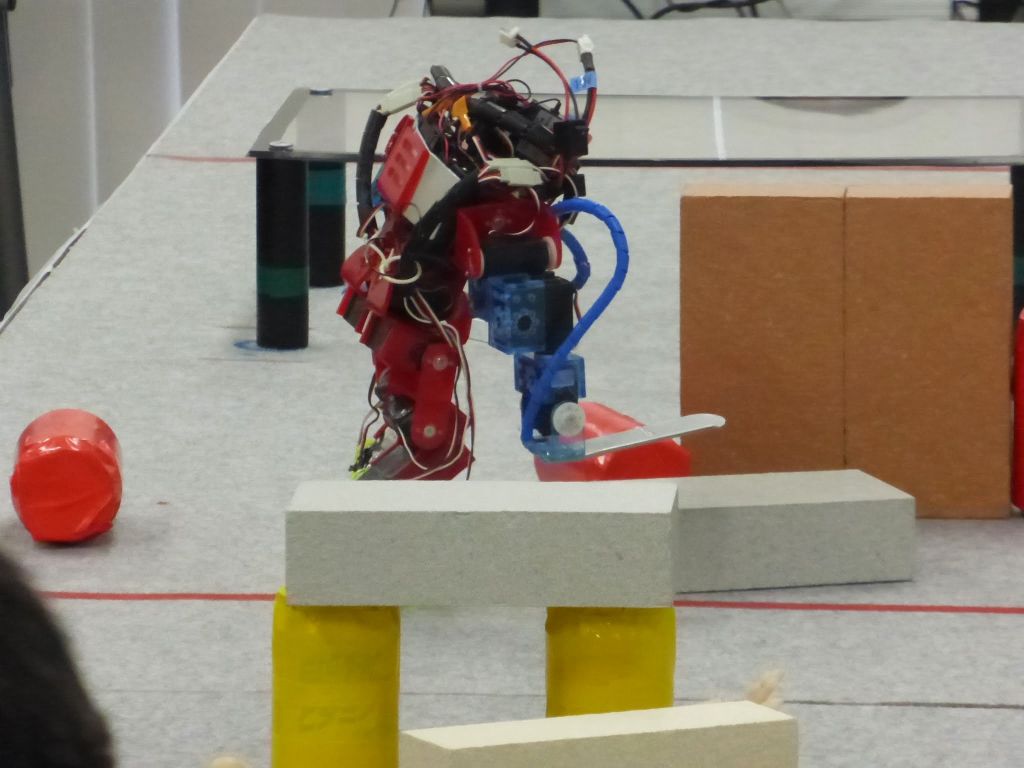
画像15:自分が倒れないように通り道を作る弐号機(久保田氏/産業技術短期大学)

画像16:両腕で丁寧にガレキをどけるRobovie-PC Ver2.0(今川氏/ヴイストン株式会社)
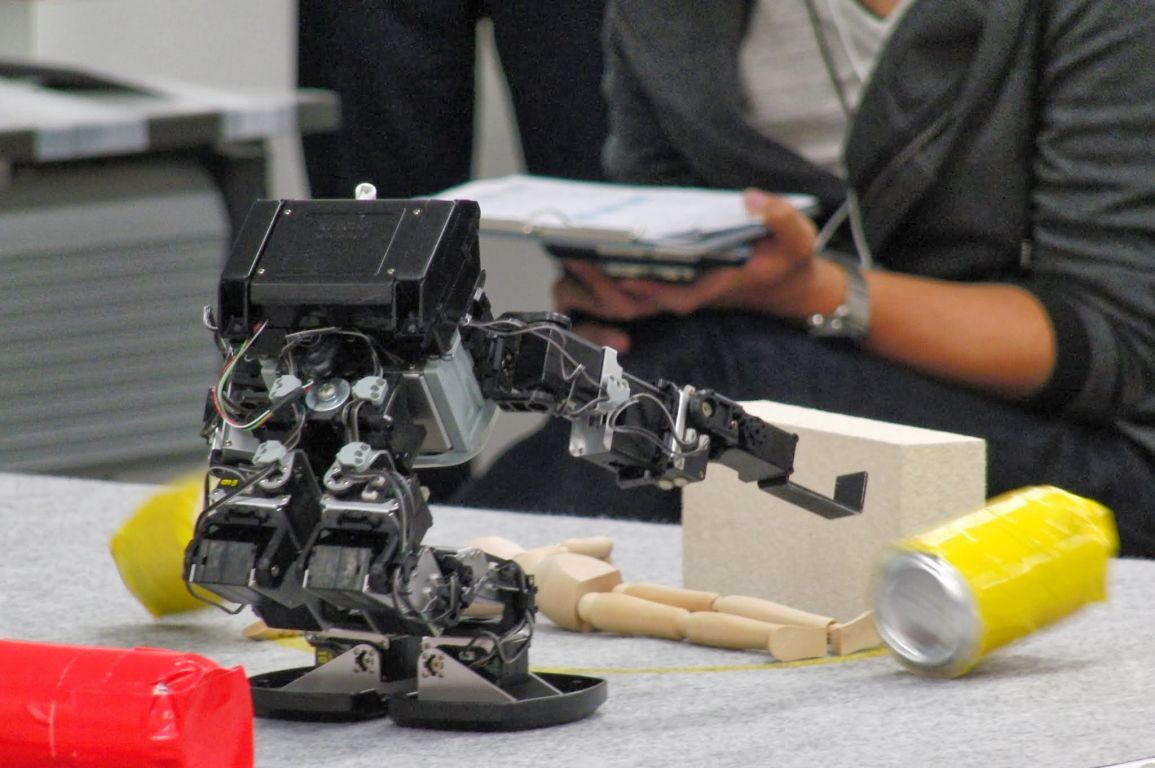
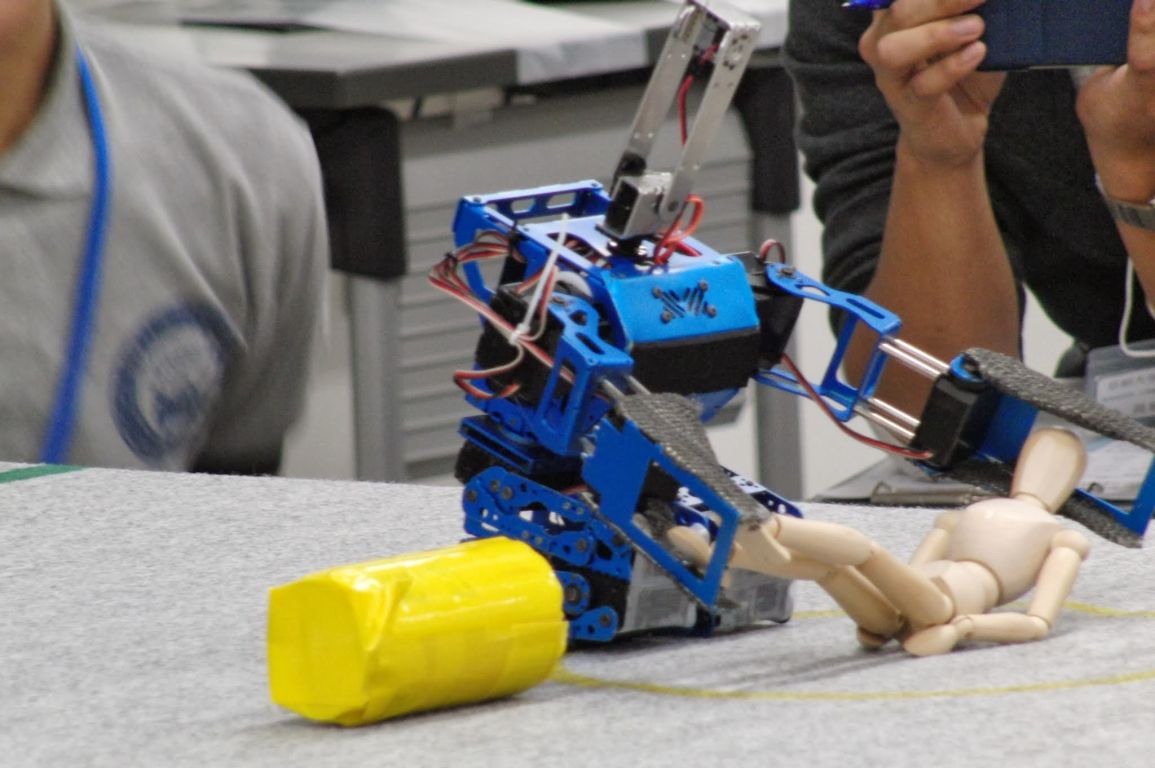
いよいよ要救助者の救出であるが、その前に要救助者の周りにあるガレキを救助エリア(直径32cmの円)の外に除去することが求められている。ガレキを抱えて放り投げたり、手や足で弾き出したりしても構わない。注意しないといけないのが、要救助者の上にガレキを落としたり、ロボット自身が要救助者にダメージを与えたりしてはならないことである。要救助者に気を配りながらやさしくガレキを除去することが重要だ。(画像17、画像18)要救助者に対する危険行為はイエローカードが出され、3枚貰うと失格である。
画像17:両腕を素早く動かし、ドラム缶ガレキを飛ばす飛之助(緒方氏/九州工業大学)
画像18:上に載っているガレキを掴みどかす大電通コマドリー改(近藤氏/大阪電気通信大学 自由工房)
無事にガレキ除去が終わったら、要救助者を抱え上げ、ゴールまで搬送する。要救助者の脇に腕を入れ抱え上げる、横方向から持ち上げるなど救助方法は様々だが、優しく扱うことが重要だ(画像19、画像20)。

画像19:救助専用ハンドで要救助者を持ち上げる飛之助(緒方氏/九州工業大学)
画像20:抱き上げる救助を行うRB2000SF(zeno氏)
要救助者を抱えた後はゴールラインを目指す。ヒト型ロボットで要救助者を落とさないように安全に素早く搬送を行うのは難しい課題である(画像21、画像22)。ここでは、実際に人間を救助することを想定して、救助や搬送方法が考えられており、ポイント獲得にとらわれない競技者独自のレスキューに対する意気込みが見られる。たとえば、搬送する際に要救助者に振動を与えないために時間はかかってもゆっくりと歩いたり、ゴールラインに到着した後にやさしく要救助者を下したり、この様なシーンが見られるのもヒト型レスコンの魅力である。
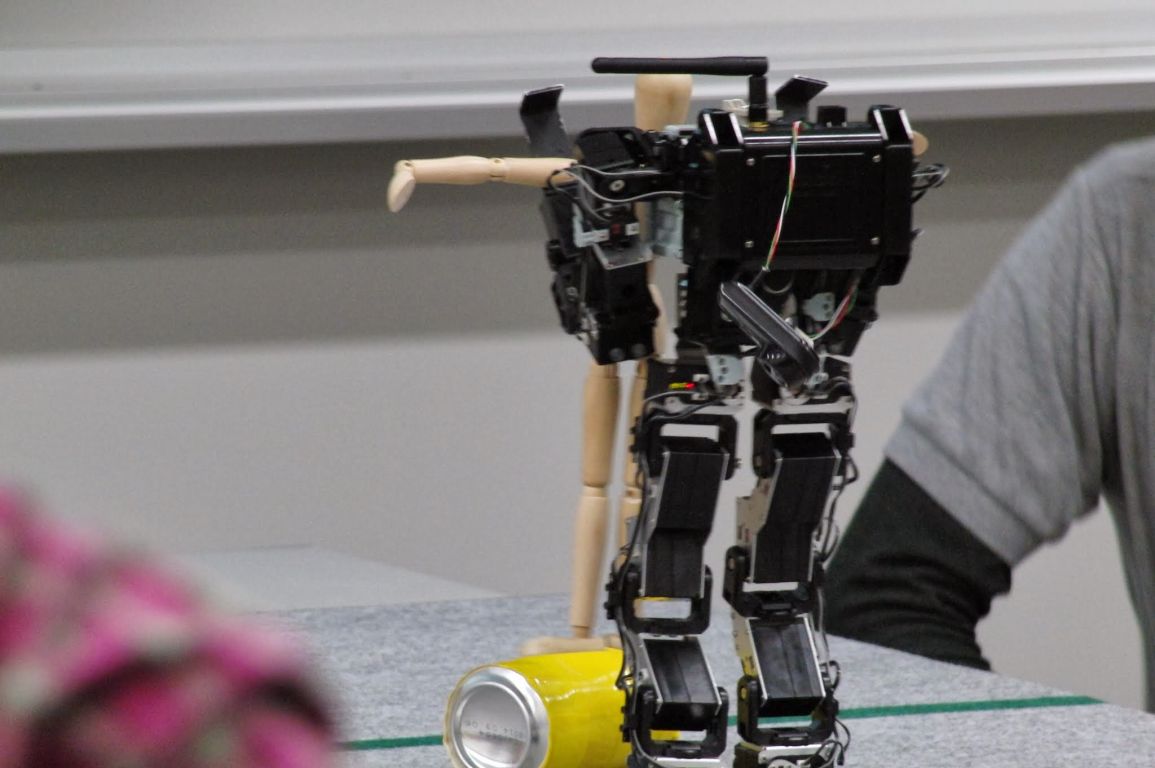
画像21:要救助者の脇に腕を入れしっかりと持ち上げ搬送する飛之助(緒方氏/九州工業大学)

画像22:ハンドで要救助者を固定し安定に歩行するRobovie-PC Ver2.0(今川氏/ヴイストン株式会社)
以上が、一連のレスキュー活動の流れとなる。
このコンテストは、ファーストミッションとファイナルミッションの順に行われる。ファーストミッションは競技時間6分間で、高得点を収めた上位6名はファイナルミッションに進むことができる。ファイナルミッションでは、搭載カメラ部門と目視部門に分かれる。目視部門は、ファーストミッション同様に目視で遠隔操縦を行う。搭載カメラ部門は、ロボットに搭載されたカメラからの映像だけを頼りに遠隔操縦しなければならない。搭載カメラ部門では、競技時間は3分長くなり、9分になる。
搭載カメラ遠隔操縦
搭載カメラ部門では、競技者はフィールドに背を向けてスクリーンに映した搭載カメラの映像を頼りに操縦を行う(画像23)。本来レスキューの現場を考えると、搭載カメラによる遠隔操縦は必須の技術である(本家レスコンでも搭載カメラ遠隔操縦が前提)。ヒト型レスコンでは、当初、搭載カメラによる遠隔操縦は技術的に難しすぎるので、目視による操縦を想定していた。しかし、2011年から搭載カメラ遠隔操縦に挑戦する参加者が現れたので、今回から、搭載カメラ部門と目視部門に分けることになった。

画像23:中央の椅子に座りカメラ映像を見る緒方氏
搭載カメラによる遠隔操縦の難しさは、視野が狭く、臨場感が得られないところにある。また、第3者的な視点ではないため周りの状況を判断しにくい。さらに、歩行中にはカメラが揺れて、映像が見づらい。搭載カメラのみでうまく操縦するには、かなりの工夫や練習が必要である。
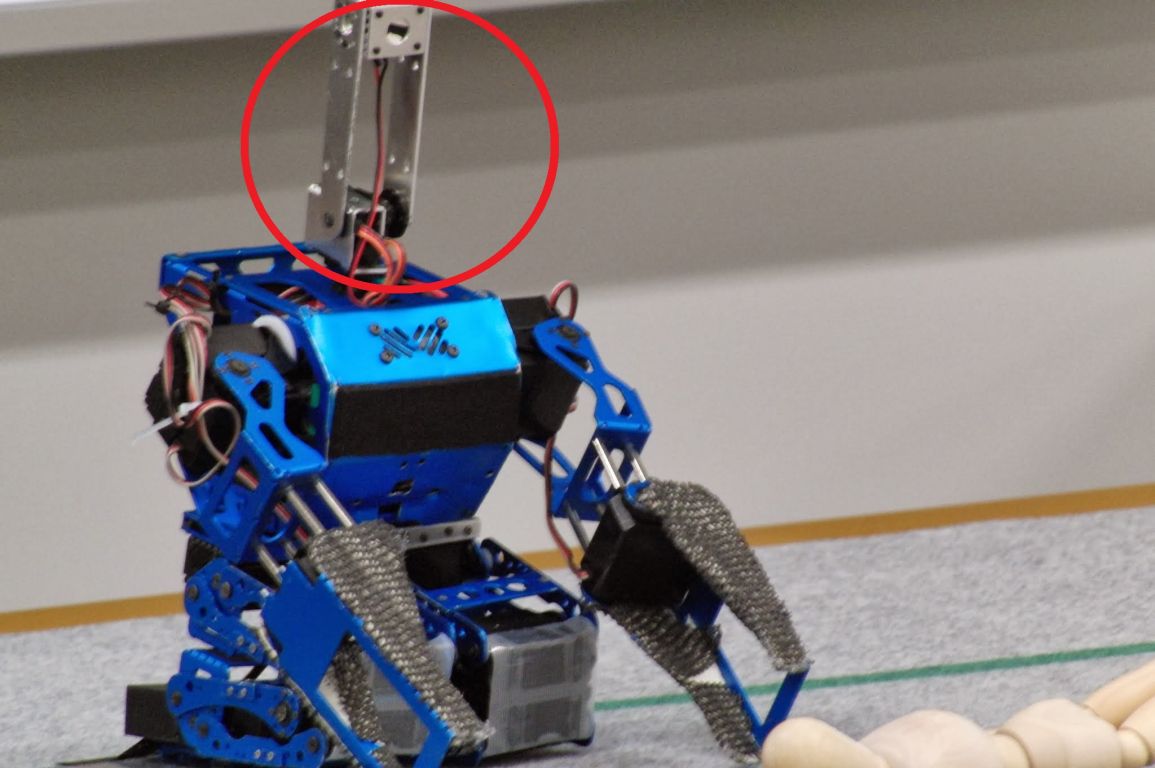
今回、搭載カメラ部門に出場した3名の取り組みを紹介する。緒方氏の飛之助は、ロボットの頭部にUSBカメラを取り付け近藤科学の無線LANのセットを使っていた(画像24)。頭部に取り付けたカメラは固定されているため、周囲を見渡すには、ロボット自体が旋回したり腰を曲げたりせねばならず苦労していた。
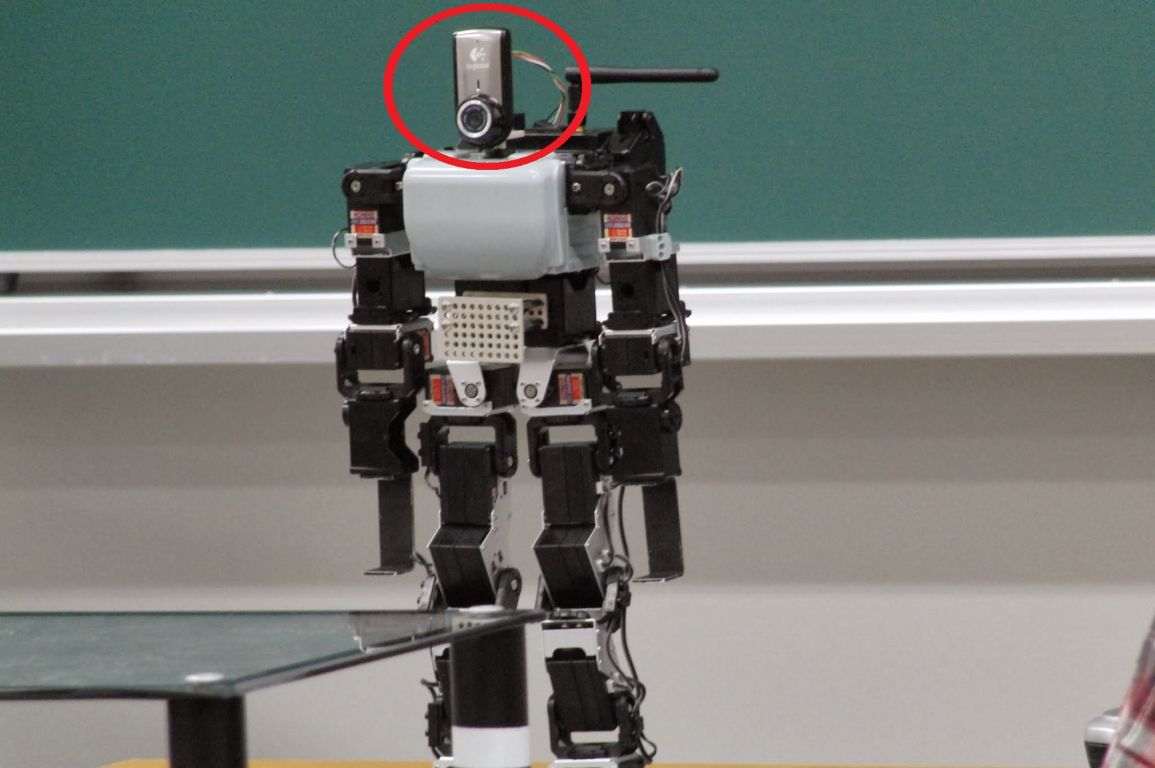
画像24:緒方氏のヒト型ロボット飛之助は、頭部がUSBカメラである。
今川氏のRobovie-PC Ver2.0は、ロボット自体に搭載されているコンピュータでWindowsが動いているため、USBカメラを接続し、無線LANを用いてSkypeで映像伝送を行っていた。カメラは、頭部に内蔵されていて、首が人間の様に動き周囲を見渡せるようになっている(画像25)。しかし、下を見るときはロボットの胸部が邪魔で足元が確認しづらいようだった。
画像25:右肩の黒い筒状のライトで前を照らし、頭部に内蔵のカメラで障害物を確認する
Robovie-PC Ver2.0(今川氏/ヴイストン株式会社)
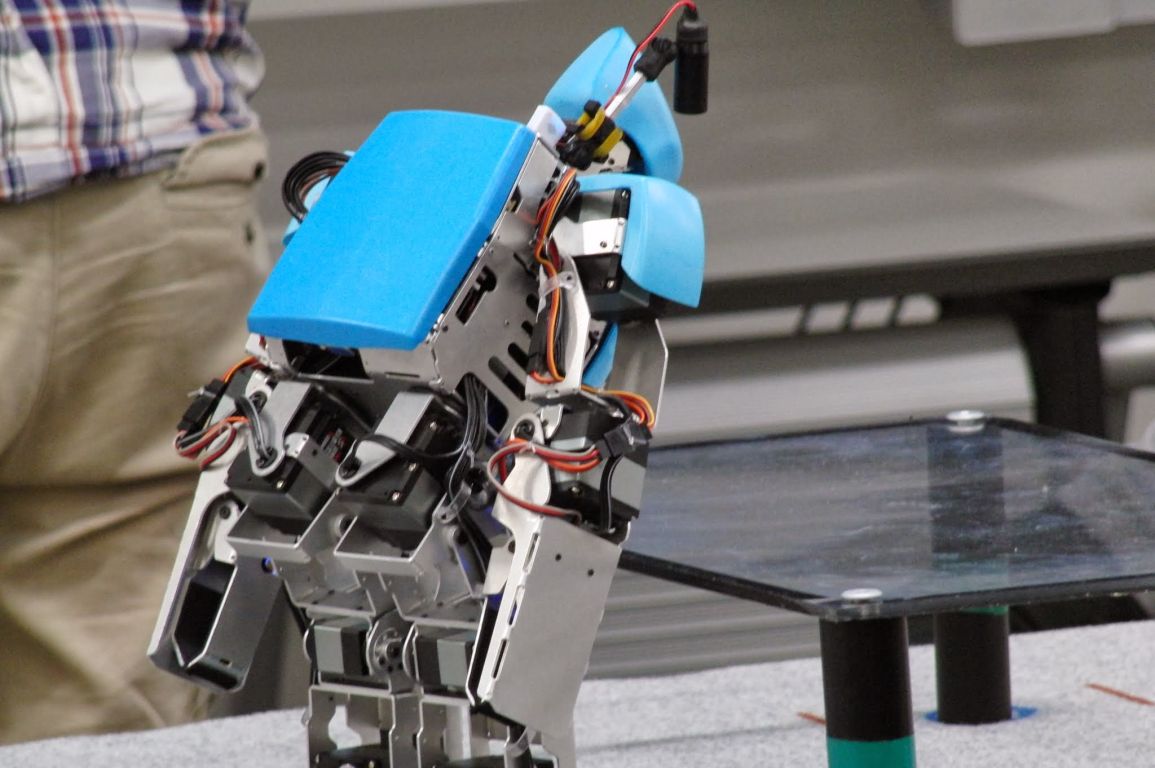
zeno氏のRB2000SFは、鉄道模型に使われるトレインスコープと呼ばれる超小型カメラをロボット頭部に搭載していた。頭部への取り付けは一工夫されており、高い位置に取り付けられている(画像26)。この頭部には、左右と前後に動くように2軸のモータが付いており、ロボットのボディに邪魔されずに足元やロボットハンドの先を確認しやすくなっている。
画像26:頭部の先端にカメラを取り付け、サーボで根元のピッチ軸が回転するRB2000SF(zeno氏)
また、今川氏は、2011年のヒト型レスコンからヘッドマウントディスプレイを用いている。これには、姿勢センサが付いており、操縦者の頭が向いた方向にロボットも首を回すようになっている(画像27)。これにより、操縦者の見たい方向を素早く見られるようになっている。

画像27:今川氏が下を見るとロボットも下を見る。
表彰とまとめ
搭載カメラ部門では、審査ポイントが僅差だったが、トンネルくぐりや段差乗り越えを安定した動きが評価され、zeno氏のRB2000SFが第1位となった。目視部門では、人間らしい障害物の乗り越えや丁寧なガレキ除去が審査員に大きく評価され、近藤氏の大電通コマドリー改が第1位となった。また、総合ポイントが最も高い選手に贈られる電通大杯は、近藤氏の大電通コマドリー改となった(画像28、画像29、画像30)。
画像28:搭載カメラ部門で入賞した今川氏(左)、zeno氏(中央)、緒方氏(右)

画像29:目視部門で入賞した高嶋氏(左)、近藤氏(中央)、久保田氏(右)

画像30:技術賞を受賞した今川氏(右)、奨励賞を受賞した中野氏(左)
今回、技術賞を受賞した今川氏は、操作系を改良しファーストミッションからマイクロソフトの「Kinect」(人間の体のポーズを読み取る装置)を用いて、自分の動きをロボットに伝えるマスタースレーブ方式によりヒト型ロボットの両腕を操縦した。さらに、通常のゲームコントローラでは、「Kinect」と併用しにくいので、任天堂の「wiiリモコン」と「拡張コントローラヌンチャク」を用いてロボットに細かい命令を送れるようにした(画像31、画像32、画像33)。この高い技術とそれを競技に活かしたことが評価され受賞となった。
画像31: ロボットの両腕と今川氏の腕が、連動している。

画像32:コンテスト初「wiiリモコン」と「ヌンチャク」 による操作

画像33:「Kinect」で認識された今川氏が画面に緑色で表示される。
表彰式の講評で、審査委員長である愛知工業大学の奥川先生は「このコンテストは、なぜ車両型や変形ロボットではなく、ヒト型ロボットでレスキューをするのか意味をもっと考えてほしい。ヒト型ロボットでもっと様々な手法を考えて競技中にアピールしてほしい。」と次回のヒト型レスコンに対する期待をコメントした。
一方、実行委員長の大阪電気通信大学の升谷先生は「今回、トンネルくぐりや段差乗り越えをクリアして要救助者のところまで行けているが、制限時間内で搬送完了できるロボットは少なかった。来年からは、搬送完了までできるロボットがもっと多くなってほしい。」とコメントした。
競技全体を見て、子供から親御さんまで熱心にロボットを応援する姿が見られた。ロボットがタスクをクリアした際などは、拍手や驚きの声が上がっていた。競技者もその声援に答えるように、ヒト型ロボットによるレスキューに全力を注いでいた。絶対に要救助者を救助するためにあきらめずに、トライするところなど、レスコンならではである。会場で目を輝かせてロボットを応援した子どもたちが今後、災害対策やレスキューロボットについて考え、災害に強い未来を築いてほしい。また、ヒト型レスコンに興味を持ってくれたのならぜひ、このコンテストに参加してほしい。
補足
実行委員会では、ファイナルミッションの6競技の公式映像を公開している。
