





-
リンク
「ロボット相撲」カテゴリーアーカイブ
モーション調整
ロボファイト14に向けて、歩行モーションの調整をしています。歩いているうちに、右に旋回してしまうので、それを直しています。このあと攻撃モーションなども調整していく予定です。(矢野健太君:情報学科1年)

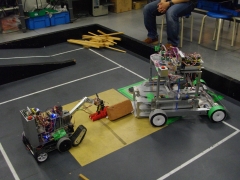
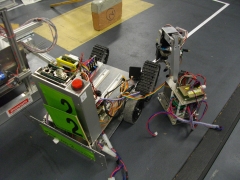
3号機:本選までの課題
10日までにパーツの発注を行います。モーターと軸が届きしだい、動力部分を改良していきます。ガレキ除去アームも作り7月下旬までに、ロボットを完成させ練習を積みます。(清家悠太郎君:電子機械工学科2年)

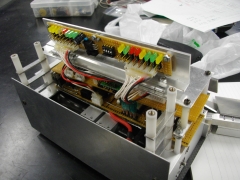
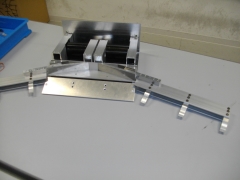
メンテナンス性の改善
これまでナットで止めていたのを、板をねじ切りして、ネジだけで止めれるようにしました。メンテナンス性が向上しました。来週は、エンコーダーにゴムをつけて、走行中の揺れを防ぐようにします(目黒隼人君:機械工学科4年)
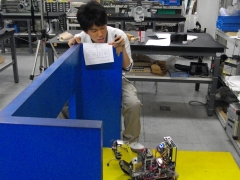
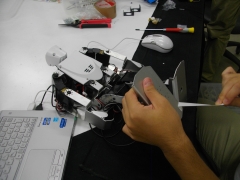
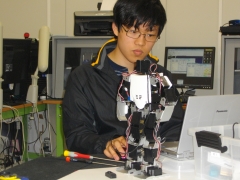
モーション作成
組み立ててあったロボットを一旦バラして、再度組み立てました。これからモーションを作成します。まず立たせて、ホームポジションをとるところまでできました。(村上 孟君:情報学科1年)
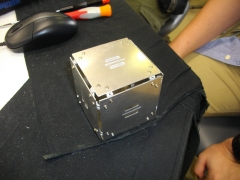
3DCADでサイコロ
3DCADの使い方を教わって、課題のサイコロを作りました。3DCADは初めてだったので最初は戸惑いました。3日くらい掛けてデータを作り、モデラでアルミを切り出して組み立てました。今後のロボット制作に役立てたいです。(大橋賢嵩君:情報学科1年)
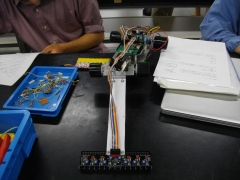
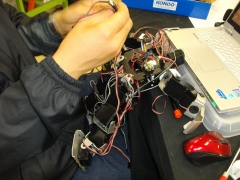
センサーの修理
スタートバー用のセンサーが動いていなかったので、修理しました。赤外線センサの端子が切れていて、LEDが光っていませんでした。(目黒隼人君:機械工学科4年)

