

-
リンク
「ロボット相撲」カテゴリーアーカイブ
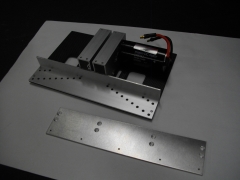
ギアボックスの作り直し
以前作った右側のギアボックスが、穴のあけ位置を間違えていたので作り直しました。左右の高さがあうので、走りが向上されると思います。シャーシやサーボモーターを載せている板も、板金加工に失敗している部分があるので作り直します。(目黒隼人君:機械工学科4年)


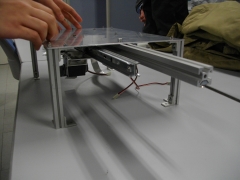
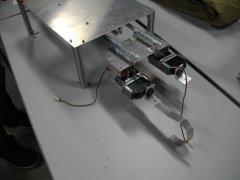
3号機:上下せり出し機構
上下せり出し機構と駆動部分を作成中です。上下機構が上に上ってダミヤンを救助するために、アームをせり出した時に、ロボットが横転するのではないか? と懸念が出ています。反対側にガレキ除去用のアームが搭載されるので、それと相殺できる予定ではいます。(清家悠太郎君:電子機械工学科2年)
2号機:アーム設計
CADで設計をやりました。レイヤーの使い方で悩みました。ほとんどの部品の設計を終了し、寸法出しまでできています。あと5時間くらいでアーム設計が終了する予定です。(鼓 悠介君:環境技術学科2年)
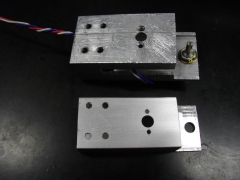
部品の小型化
ハンドリング機構部分の部品を小型化し、重心を下げるために作りなおしました。フライスで加工したときに、穴がズレてしまいました。加工しなおすか、穴の径を大きくしてごまかすか検討中です。(三原和也君:通信工学科3年)
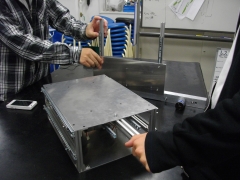
シャーシ制作
アーム根元のブレードを載せる部分を作りました。組み立ててみたところ、精度には問題がないと思います。カーボンを加工するのは初めてだったので、アルミの加工とは勝手が違い手間取りました。(西原琢也君:電子機械工学科2年)
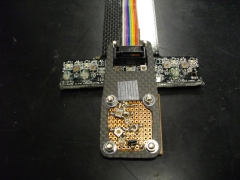
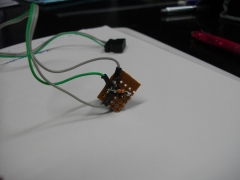
エンコーダー作成
ケーブルとピンのハンダづけを、ショートしないように丁寧に作業をしました。何度か失敗してやり直しもしています。(高城康一君:電子機械工学科1年)
2号機:ベルトコンベア
ベルトコンベアのベルトを摩擦で廻すための軸を作成しました。次はこの軸を取り付ける板金加工に入ります。(鼓 悠介君:環境技術学科1年)