「レスコン」カテゴリーアーカイブ


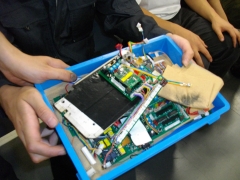
マイコン基板
平窪さんが、新しい中継基板と自作マイコン基板を作りました。これまで自作だったのを業者に頼んでパターンを起こしました。従来より安定性が増し、サイズが縮小されました。動作チェックも済んでいます。(山中拓也君:電子機械工学科2年)

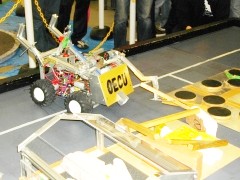
黒チーム:3号機
ガレキ除去専門機です。倒柱ガレキをクリアし、通路上やダミヤンの周囲のガレキを除去しサポートに徹しました。倒柱ガレキを上げるアームの形状を再考する必要がありそうです。

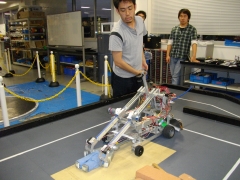
黒チーム:操縦練習
審判を2人置いて、3台のロボットを各オペレータが操縦して協働でダミヤン救助の練習をしました。現時点では、目視コントロールしていますが、1台が7分台でダミヤン救助に成功しています。




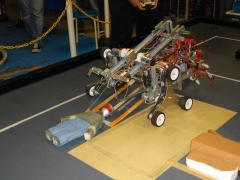
銀1号機:ダミヤン救助
上から2本のアームを伸ばしてダミヤンを確保。ダミヤンの上半身を持ち上げた下に、ベッドを差し込んで救助します。救助中に、片方のアームのケーブルが抜けてしまいました。対策が必要です。(齋藤佑一君:電子工学科4年)

銀3号機:ダミヤン救助
ダミヤンの下にベッドを差し入れてから、アームでダミヤンを引き込む形式です。ダミヤンを保護した後、重みでベッドを支えている紐が切れてしまいました。強度を考えた修正が必要です。(齋藤佑一君:電子工学科4年)

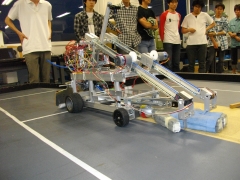
黒1号機:ダミヤン救助
救助ハンドをダミヤンの脇に挟み込んで、ダミヤンを持ち上げて救助します。位置取りが難しいので、操縦練習が必要です。(浦中雄太君:電子機械工学科2年)


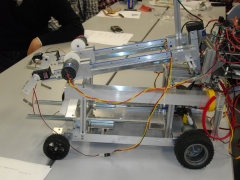
黒2号機:揺れ対策
サーボを取り付けて、ベッドの揺れを押さえるようにしました。平面を走っている時に、コントローラーでベッドを押さえます。(小國翔平君:電子機械工学科2年)


銀チーム:ハンドの改良
前回は、かぎ爪のハンドをつけていましたが、ガレキ除去や細かい動作ができませんでした。サーボをつけて、自在に動くようにしました。ロボットに取り付けて動作確認も済んだので、量産化しています。(齋藤佑一君:電子工学科4年)