
「知能ロボコン」カテゴリーアーカイブ
無線通信のテスト
無線通信のテスト用にEXP8266を購入しました。XBeeよりも格段と小さくて価格も安い。Arduinoに接続してみます。新作ロボットを無線コントロールできるようになりたいです。(橋本悠杜君:情報工学科2年)


カテゴリー: 知能ロボコン


マスターズコースのオブジェクト
今回は、チャレンジコースに出場したので、オブジェクトはボールだけでした。今後は、より難易度の高いマスターズコースにも参加してみたいです。マスターズコースで使用されているオブジェクトを用意しました。


カテゴリー: 知能ロボコン
ライントレース
カーブをキレイに曲がれるようになりました。大会にでたときのアームも搭載してトレースさせてみたら、走行中のブレが大きくなりました。(上神健二君:電子機械工学科2年)


カテゴリー: 知能ロボコン
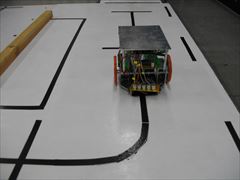
ライントレース
ライントレースをちゃんとやりたいので、ネットで情報を収集して、車輪の幅などを計算してプログラムをやり直しました。小1時間くらいの調整で格段にキレイにトレースできるようになりました。(上神健二君:電子機械工学科2年)
カテゴリー: 知能ロボコン
センサーの断線が敗因
知能ロボコンで、Elephantは敗者復活戦で8点入れたものの予選敗退しました。8点しかとれなかった理由は、ラインを読み取るセンサーの1つが断線していたからです。会場でロボットをみたときにイモネジが緩んでいたので、それが原因だと思っていました。キャリーバッグにいれて会場に持っていったときに、ごろごろ転がしていたので切れたのかもしれません。(上神健二君:電子機械工学科2年)

カテゴリー: 知能ロボコン
知能ロボコンの感想
さまざまなロボット見てきました。前日にマスターズコース部門があって、アームを使って缶やボールを運ぶロボットを見ました。知能ロボットには、オブジェクトを吸い込んだり、2台のロボットが協調して動くような技術力が高いロボットがいて、見ていて楽しかったです。次回の大会に向けて、無線制御と小型化をしたいと思いました。(橋本悠杜君:情報工学科1年)


カテゴリー: 知能ロボコン
スピードアップ
ボールをつかんだ後に、スピードをあげて色を識別しゴールにいれるように調整しました。スピードはあがりましたが、動きが荒くなって正確性が落ちてしまいました。5分で6個のボールをゴールにいれました。予選はクリアできる基準だと思っています。(上神健二君:電子機械工学科2年)


カテゴリー: 知能ロボコン
モータードライブ基板
前に使っていたモータドライブ基板がダメだったので、基板を変えました。サーボモータードライブも変更しました。プログラムを書き込めたり書き込めなかったりするので、断線しているのかもしれません。(向井 誠嗣朗君:電子機械工学科2年)


カテゴリー: 知能ロボコン

