活動日誌
1年生は教育用ライントレースのプログラムを製作しています。
先輩方に教えてもらいながら頑張っています。

2024.03.12:「知能ロボットコンテスト 関西地区チャレンジ大会 2024」レポート
2024.03.09:「ロボファイトinATC大阪2024」レポート
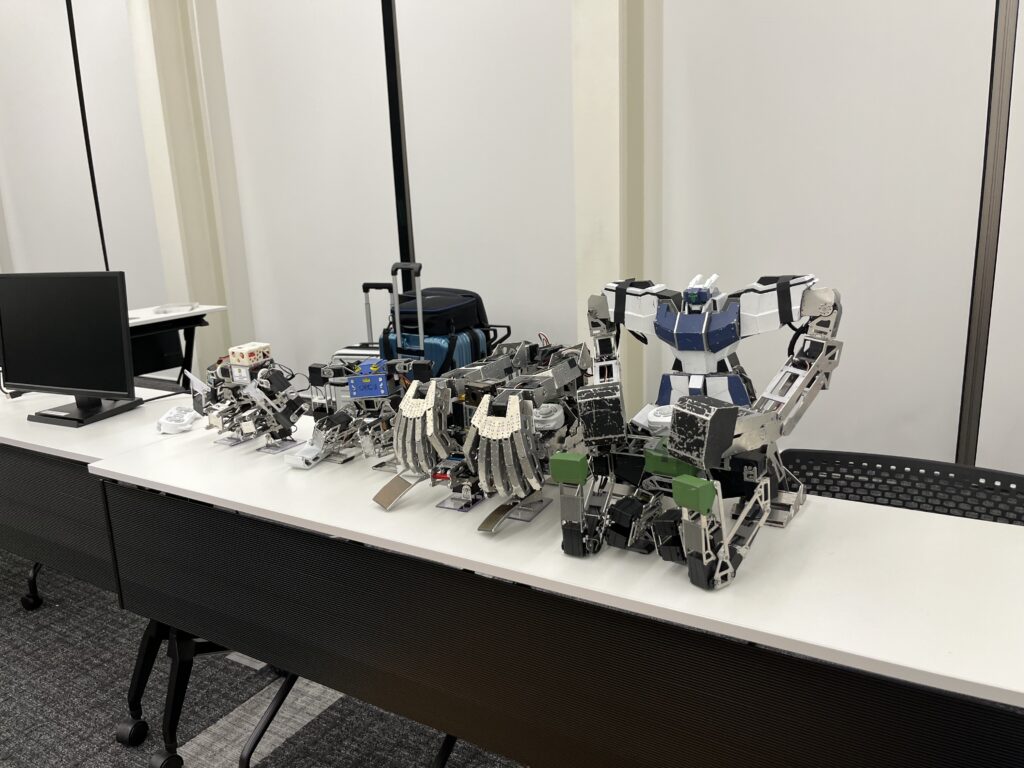
2024.03.03:「ROBO-ONE Light最終認定大会」レポート
2024.03.02:「ROBO-ONE Light最終認定大会」レポート
2024.02.19:「第44回全日本マイクロマウス大会」レポート
1回生は教育用のライントレース制作中です。
2024年4月10日 :
カテゴリー: マイクロマウス
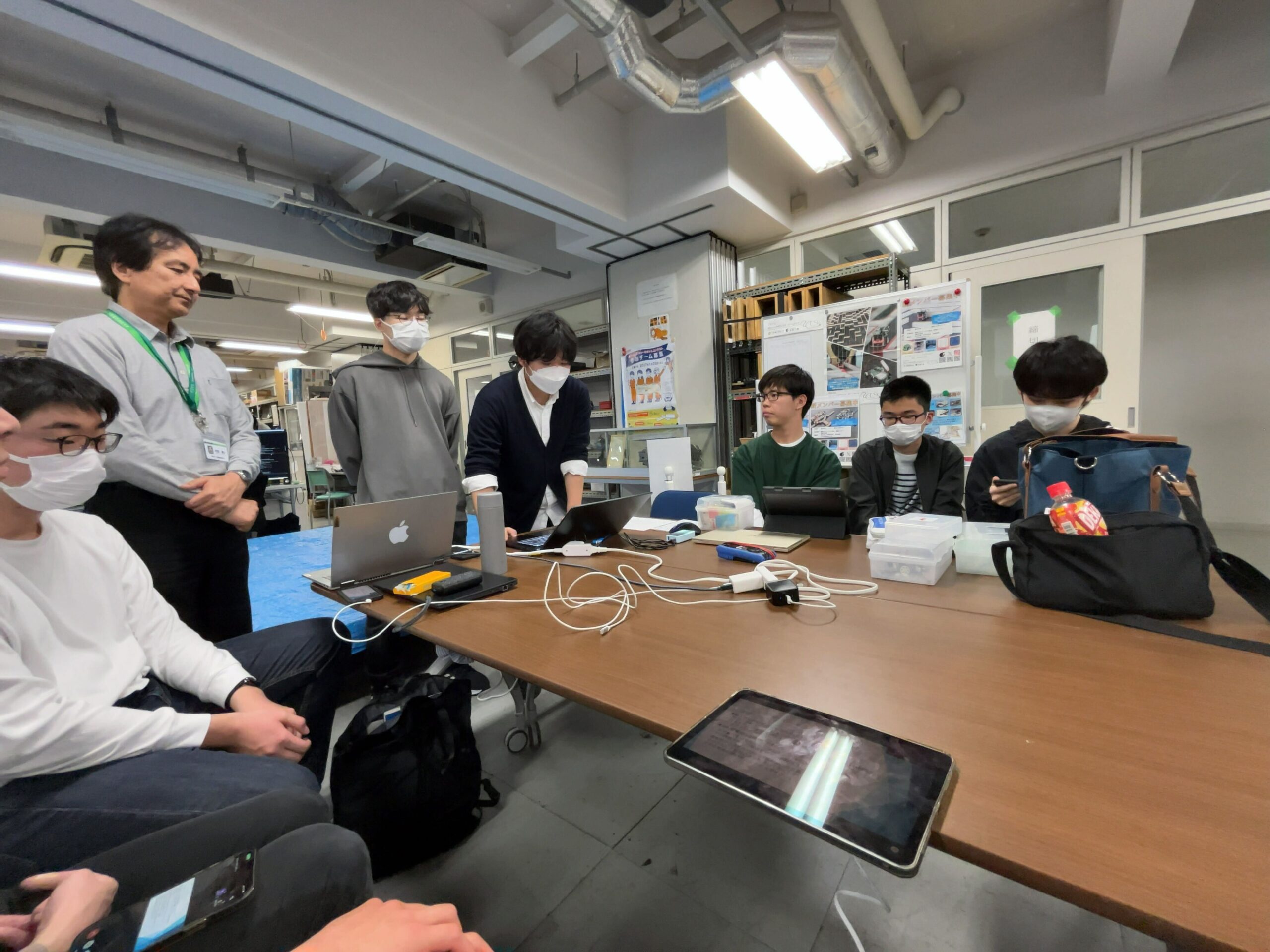
4月8日、大阪電気通信大学での授業開始日に、マイクロマウスプロジェクトに新1回生が5人増えました。ミーティングで自己紹介をおこなった後、早速はんだ付けの講習をおこない、早い人は教育用マウスの製作に取り掛かっています。初めて後輩ができた新2回生を中心に、マウスのことを教えていく予定です!
2024年4月9日 :
カテゴリー: ヒト型ロボット
4/3(水)〜4/5(金)に寝屋川キャンパスA号館のコンベンションホールにて開催されていた新入生歓迎会に自由工房HRPも参加してきました
1日目は雨で天候が崩れていましたが3日間ともたくさんの新入生の方が来てくださりました!
今回の3日間以外にも4/15、18,5/9にて四条畷キャンパスにある私たちが普段実際にロボットの作成や操縦練習をしている部屋 (2号館3階 2-301号室)を見学することができます。
より自由工房HRPの魅力を知ることができるので是非お越しください!