自由工房にあったベーシックマシンを使って、C言語を勉強中です。まずはサンプルプログラムを解析しています。スムースに走れるようにモーターの切り角やスピードの調整をしてみています。(目黒隼人君:機械工学科3年)



自由工房にあったベーシックマシンを使って、C言語を勉強中です。まずはサンプルプログラムを解析しています。スムースに走れるようにモーターの切り角やスピードの調整をしてみています。(目黒隼人君:機械工学科3年)
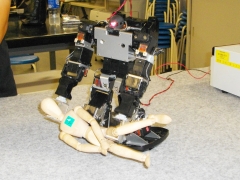
ヒト型レスコンに向けて、モーションを作成中です。右手の向きを変えて、ダミヤンを救いあげるときに、頭を支えられるようにしました。オペレーション練習を繰り返して、他にも救助に必要なモーションがあるか確認します。(中村 介君:機械工学科2年)

下半身がほぼ完成して、調整をしていく段階です。上半身はパーツ流用も多く、設計も終了しています。モデラで1.5mmのアルミを切削してフレームを作成します。今は、モデラを使う人が多いので順番待ちです。(榧木方俊君:メディアコンピュータシステム学科3年)


モーターフレームを自作しました。が、板厚の計算を間違えてしまい、寸法が合いませんでした。時間を掛けて作った板金が失敗していると、めげた気持ちになります。次からは、しっかりチェックしようと思いました。(大石達也君:メディアコンピュータシステム学科1年)


近畿大会で低速重量タイプのマシンと対戦したときに、ロボットが直進できなくなりました。まっすぐに走る場面で、右に曲がってしまうので、原因を究明中です。(西原琢也君:電子機械工学科1年)


ロボファイト13で、重心設定のレギュレーション違反が原因でトーナメント戦に出場できなかったので、調整しました。並行して、ロボットのカスタマイズも進行しています。まずは平行リンク足機構を製作しています。(大石達也君:メディアコンピュータシステム学科1年)


タイヤのゴム精度が今ひとつだったので、新しいタイヤが届くのをまっています。その間に、基板の動作確認をしようとしたら、FETが「ぱぁん!」と言って動かなくなりました。困ってます。(佐伯拓哉君:電子機械工学科1年)


完成当時は3100gで、規定の3000gをオーバーしていました。今、2950gまで軽量化しました。電圧を上げて実験したらパワーが出たので、電源を追加できるように、あと50g減らしたいです。(西原琢也君:電子機械工学科1年)


去年は、動作はできたけれど、自分の思うように動かせませんでした。去年のモーションを活用して、オペレーションの練習をしていい成績を出したいです。実践的な練習をしておきます。(中村 介君:機械工学科2年)



