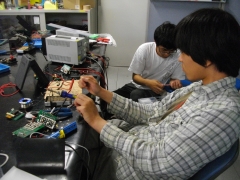
これから3ヶ月間に渡り、毎週1回自由工房でC言語の講習会をやります。4回生が1回生に対して、実施しています。



全体練習を終えたので、バッテリーを充電中。バッテリー数に余裕があまりないため、効率よく管理をしています。ロボットの搬出からファイナルミッションまでのスケジュールもホワイトボードに記し、メンバー全員が確認できるようにしています。プロジェクトメンバー数が多いので、情報伝達は重要です。(鮫島智樹君:電子機械工学科2年)
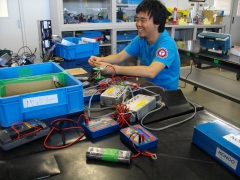
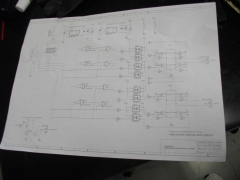
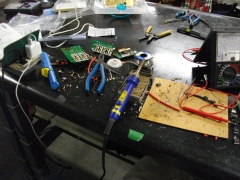
モータドライバの動作がおかしいので、制御基板の回路図をチェックしています。薦田先生と回路に詳しい中村祐一君(電子機械工学科3年)にアドバイスをもらいながら、問題点を探しています。(魚井成晃君:機械工学科3年)

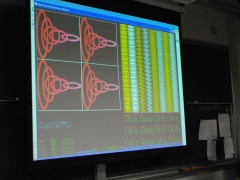
全体練習で、CACS&CIMIがしっかりと稼動しました。4台のロボットからの映像と音声をまとめて1台のPCに表示しています。ダミヤンの個別情報収集を一元化できるのはもちろん、各ロボットの活動状況は一瞥できるため、キャプテンがオペレータに適切な指示を出せるようになりました。


既存のモータドライバのチェックをしたところ、動いているものが1つしかありませんでした。修理が必要なものを直して、使えるようにします。(魚井成晃君:機械工学科3年)
バックパックが邪魔になって起き上がりモーションがうまくできません。腕を伸ばして、手をついて起き上がりができるように変更中です。(川口智大君:メディアコンピュータシステム学科2年)


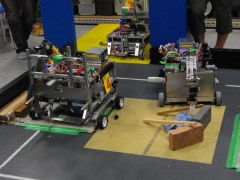
本選と同じ条件でオペレーション練習を重ねています。どのような条件であってもスムースな救助が行えるように、ガレキやダミヤンのの配置を変えて、何度もレスキュー活動を繰り返しています。この数日で、格段にレスキュー技術がアップしています。


上殿泰生君(機械工学科3年)が作成したパワーポイントを使って、スピーカーがレスキューコンセプトの説明をします。本選同様に時間を計測し、発表練習をしました。(近藤由規君:電子機械工学科1年)


CACS&CIMIで、各マシンのオペレータの画像と音声データを1つのPCにまとめます。音声に関しては、ダミヤンが出している周波数を、ロボットに搭載した2台のマイクで読み取ります。ステレオで取った音声の差分を処理して、ノイズを削除します。ダミヤンのマーカーや音声を1台のPCでチェックできるため、本部への報告もスムースに行えるようになります。(中村祐一君:電子機械工学科3年)