各ロボットが得た映像は、それぞれのオペレータの元に送られます。それらの映像を、TPIP2 RRCに組み込んだオリジナルライブラリで、メインPC1台に送ります。今は、1号機から得たデータを、転送テストしています。これから複数台の連携テストを行います。(中村祐一君:電子機械工学科3年)



各ロボットが得た映像は、それぞれのオペレータの元に送られます。それらの映像を、TPIP2 RRCに組み込んだオリジナルライブラリで、メインPC1台に送ります。今は、1号機から得たデータを、転送テストしています。これから複数台の連携テストを行います。(中村祐一君:電子機械工学科3年)
リンク式ベッドのフレームがあがらなくなってしまったので、補修しました。原因は、ウォームホイールに通っているアルミ製の軸が、イモねじで削れていたためです。軸が空回りしてしまい、保持力が落ちていました。。(目黒隼人君:機械工学科3年)

サーボ同士を接続する部品を、自作するために形状を検討中です。いろんな部品を自作し、CAD作業に精通したいです。(杉本大樹君:メディアコンピュータシステム学科2年)


28日(土)に開催されるルネサスマイコンカーラリー大会出場に向けて、機体の調整中です。モータをマブチモータから、マクソンモータに換装しました。目標は、大会で秒速k3.7m出すことです。(中井智貴君:電子機械工学科3年)

先日、新メンバーにプログラム課題を出しました。センサの値を読み込み、条件に応じてモータを適切に動かしてもらいます。資料と初期条件を渡しました。提出は28日(土)です。自分は、解答例を作っているところです。(魚井成晃君:機械工学科3年)


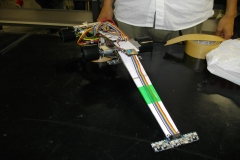
ボディのフレームが完成しました。まだガランドウですが、磁石を取り付けて吸着テストをしています。精度が今イチなのが気がかりです。(佐伯拓哉君:電子機械工学科1年)








