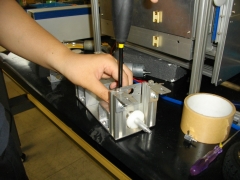
センサアームの根元に、坂道センサを搭載しました。坂が急坂ではないので、あまりアームが動かないので、調整が難しいです。これから坂道センサのプログラムを組んで、来週にはテストをします。(大西祐喜君:通信工学科2年)


センサアームの根元に、坂道センサを搭載しました。坂が急坂ではないので、あまりアームが動かないので、調整が難しいです。これから坂道センサのプログラムを組んで、来週にはテストをします。(大西祐喜君:通信工学科2年)
武器のチップを作りました。ちょっと穴位置に問題があるかもしれませんが、取り付けは可能です。試合までには、精度を上げておきたいです。(阿部史和君:メディアコンピュータシステム学科2年)

モーション作りを初めて1週間になります。モーション作りは面白いです。今は、蹴りモーションを作っています。とりあえず横蹴り。他にもオリジナルモーションを作りこみたいです。(西川真人君:メディアコンピュータシステム学科1年)


神戸サンボーホールにおいてinrevium杯「第12回レスキューロボットコンテスト」競技会予選が実施されました。自由工房からは「救命ゴリラ!!」が出場しました。1体のダミヤンを救助搬送し、96ポイントを獲得。予選順位7位で、本選出場権を得ました。詳細レポートはコチラです。


センサアームに坂道センサを取り付けます。坂道に差し掛かると、アームが上に上がって坂道センサのスイッチが入る仕組みを考えています。(三原和也君:通信工学科2年)