「知能ロボコン」カテゴリーアーカイブ
知能ロボコン本戦結果報告
優勝しました!!!
6/19(日)に開催された第34回知能ロボットコンテスト優勝しました!(下リンクから結果画面に飛べます)
http://www.inrof.org/2022/irc/prize.html
知能ロボットコンテスト名誉会長賞と書かれていますが事実上の優勝です。今回2年ぶりの大会ということもあり、どのチームも得点が高くなかなかの接戦でした。
(大会側から後日動画が公開されるのでお楽しみに)
私自身初めてのロボコンだったのでなかなか緊張しましたが、他チームの機体が見れて来年度の機体に向けて良い刺激になりました。
個人的な事を言うと面白い機体がたくさんあり、オンライン大会だったので機体の細部が見れなかったので少し残念でした。
カテゴリー: 知能ロボコン
知能ロボコン予選結果報告
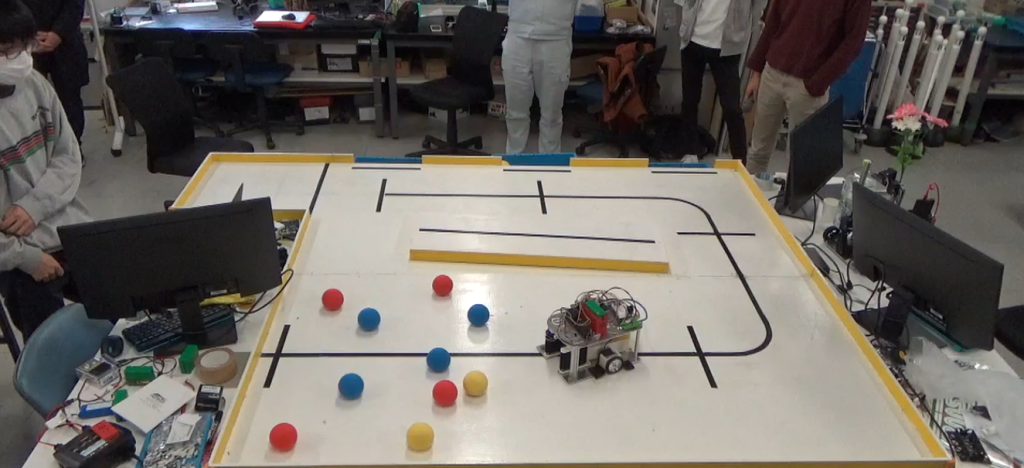
予選動画撮影兼大工大さんとのプレ大会


前回までの記事で5月28日(土)に大工大さんとのプレ大会を行いました。
それと同時に今回の予選は動画での審査なので提出用の動画撮影も同時に行いました。
予選通過のお知らせ
今回知能班として機体を2台出しました。そのうちじゅでぃあは予選通過しましたが、オオクワのほうは惜しくも通過できませんでした。
決勝が6月19日(日)に開催されるので結果はまたご報告します。
じゅでぃあ改修記録
じゅでぃあVer.2
3か月ほど前にじゅでぃあ(前回まではジュディア)を紹介しましたがブラッシュアップを繰り返しVer.2に進化したので改めて紹介したいと思います。
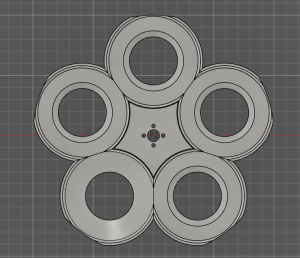
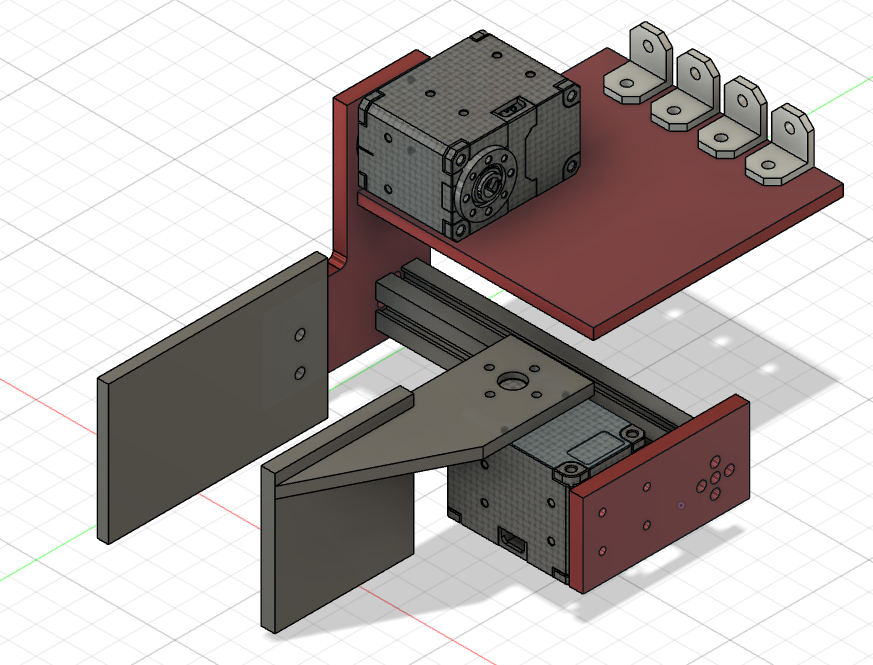
左が今回新しく制作したパーツで画像の通り一度の取れるボールの数が4個から5個になっているのが分かると思います。これにより知能ロボコンは15個のボールを運ぶルールなこともありVer.1までは全てのボールを取るのに4周しなければなかったところを3周で済むので、大幅なタイムの縮小となりました。
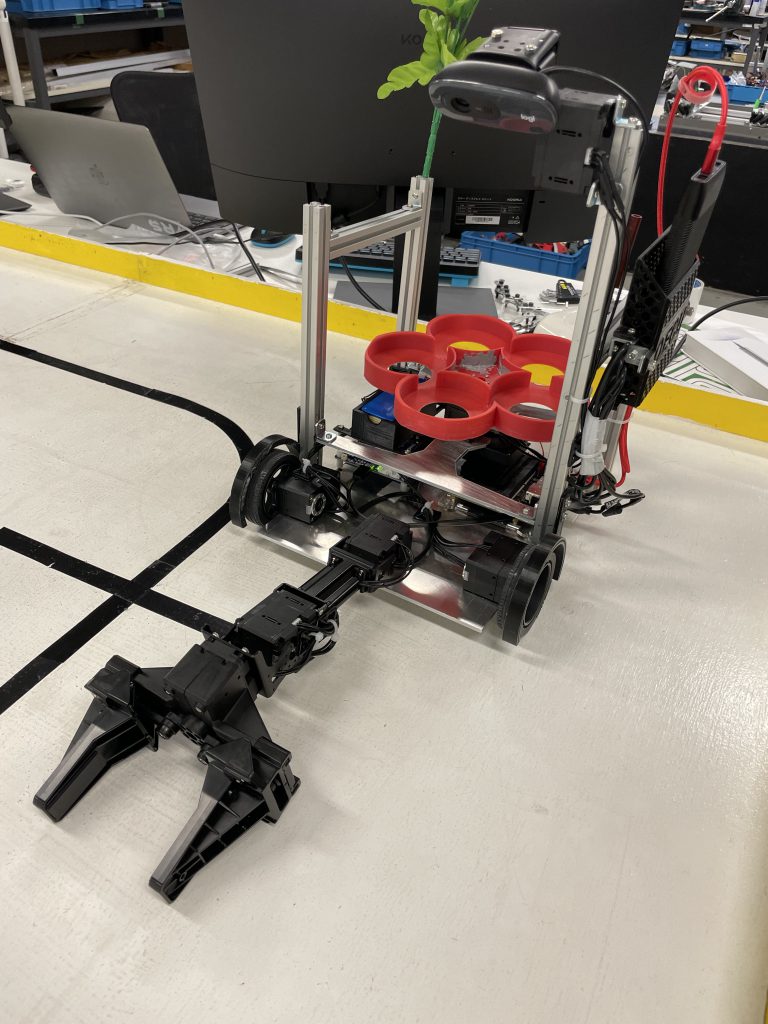

実際に制作したパーツと取り付けてみた写真です。色が黒から赤になって少しおしゃれになりましたね。
それと細かい改修ですがタイヤカバーが新しくつきました。
ご報告
大工大さんとの進歩共有会をしました
5月11日(水)に大工大さんとzoomを用いて進歩共有会を行いました。
それぞれの機体の紹介や進捗などを確認しあいました。私自身初めて他大学の機体を見れたので次に作る機体の構想などを考えるいい刺激になりました。
また5月の28日にプレ大会を行うのでまた後日感想を投稿しようと思います。
技術講習会をしました。
こんにちは!レスコン広報です!!
本日は、技術講習会をしました。
はんだの使い方やフライス、旋盤の説明を行いました。
はんだ講習では実際に回路を作ってみる体験もあり、はんだの使い方や抵抗値の読み方などを学べる機会になったのではないかなと思いました。
今日の経験を今後にもぜひ活かしてくださいね^^お疲れさまでした。


大会告知や色々
告知
2022年度第34回知能ロボット大会は6月19日(日)オンライン開催となりました
開催スケジュールとしては
- ロボットなどの情報の登録開始(5月中旬)
- 5月末までに動画を登録→審査あり (全チーム動画の登録必須です。)
- 6月上旬に審査結果(おおよそ10チームがオンライン大会へ)
- 当日にオンラインにて競技(zoomを使用予定)
- 提出された動画は編集し,なんらかの方法で公開予定
となっています。まだ詳細な日程は決定していませんが去年、一昨年と某感染症のせいで開催されなかったので嬉しい限りです。
機体紹介と部内大会
機体紹介
お久しぶりです。今回は前回予告していた三年生の機体と部内大会の紹介します。
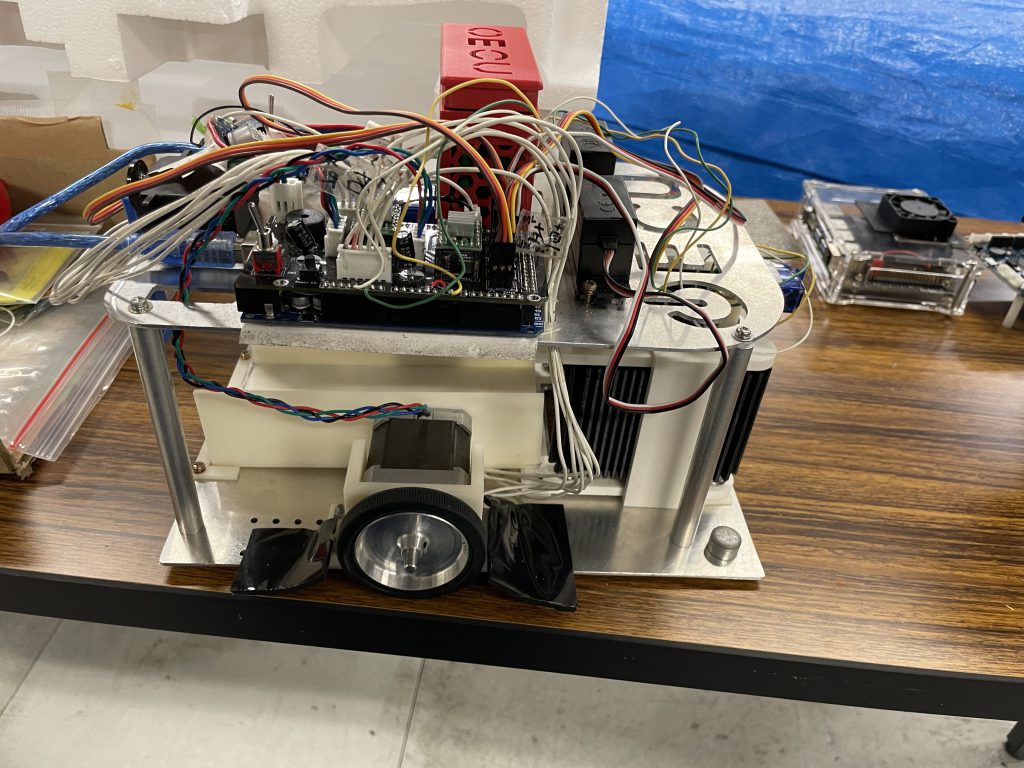
上記の機体が三年生が設計、基盤制作、プログラムを一人で制作した、機体です。
機体前方についている色センサーでボールの色を判別し、黒いベルトコンベアーによってボールが回収されます。ボールは二個まで保持でき、排球は背後から行います。
この機体にはRaspberry piといったマイコンはのっておらずaruduinoですべて制御されています。
部内大会についてのお知らせ
2月18日金曜日に無事部内大会をおこなえました。

上記は私が勝手に作成した部内大会ロゴです。
話を戻しまして部内大会では、プログラムが間に合わず一機動かなかったり、予想外の挙動をしたりとなかなかでしたが部内大会の様子は動画を作成しましたので自由工房のYouTubeチャンネルに上がると思います。
また本命の知能ロボット大会に向けて機体の改良をしていますのでまた機体の紹介をしていきたいと思います。
知能ロボット部内大会
部内大会出場機体のご紹介part2
今回は
プログラム:一年生、一人
回路設計:一年生、一人
設計:二年生、一人 一年生、一人
の計四人の班です。
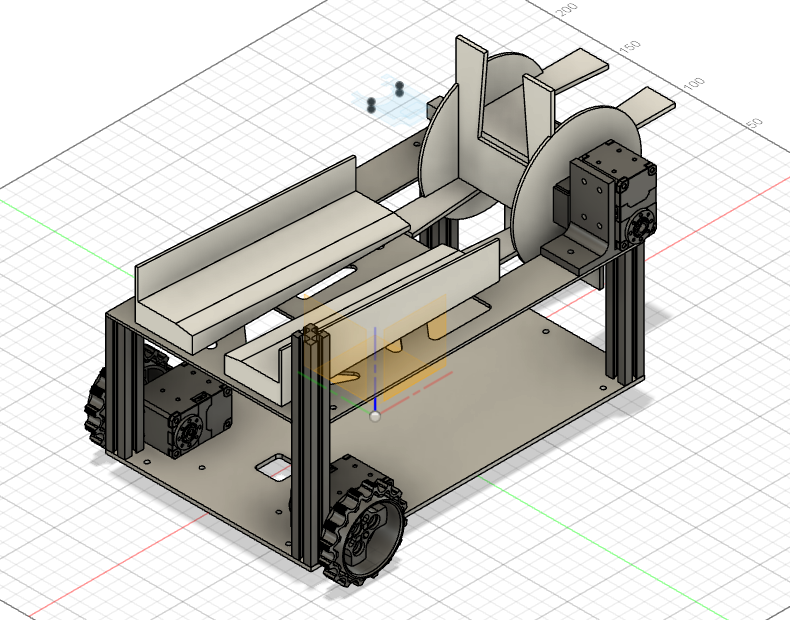
そしてこれが機体です。
下の写真のアームでボールを取り、本体のスロープでボールを保管し、背後の風車でボールを排出します。
現在制作中なので実際の機体はお見せできないので、部内大会の結果報告の時機体を見せようとおもいます。
次回は
三年生の機体をご紹介しようと思います。
カテゴリー: 知能ロボコン
知能ロボット部内大会
ご挨拶
新年あけましておめでとうございます。今回からブログ担当となりました、牧島です。
一月となり知能ロボットチームも新体制となりましたが、心機一転頑張っていきます!!
部内大会出場機体のご紹介
2月に開催する知能ロボット部内大会の出場機体を紹介していきます、が三機あるので一投稿につき一機ずつ紹介していこうと思います。
今回は
プログラム:二年生、一人
設計:一年生、一人
の計二人の班です。
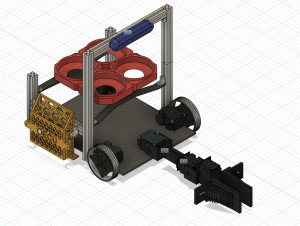
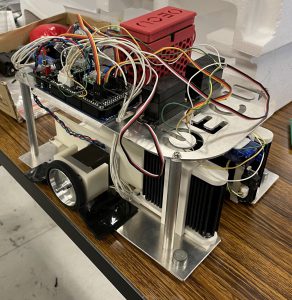
そしてこれが機体です。
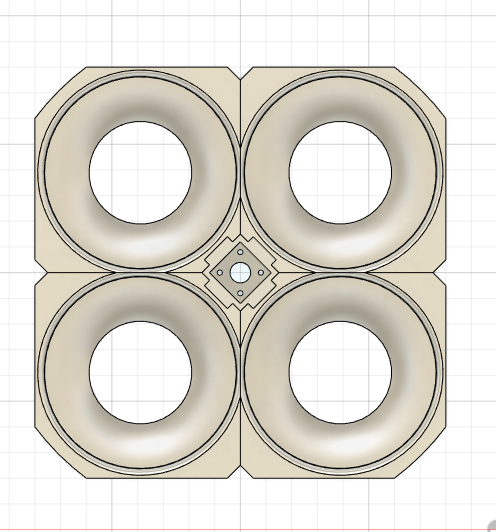
機体の先にあるアームでボールを取って、赤い回転皿でボールを保持します。赤い回転皿の下にはモーターがあるので、ボールを一個取るたびに皿を回転させることで最大4つボールを保持できます。

これが実際の機体です。所々設計データと違いがありますが写真を撮った時期が11月の終盤だったのでこれで許してください。(また新しい写真載せておきます)
次回は
プログラム:一年、一人
電子回路:一年、一人
設計;二年、一人 一年、一人
の計四人の班の方の機体をご紹介しようと思います。
カテゴリー: 知能ロボコン
ETロボコンの結果
遅くなりましたがETロボコンの大会の結果を報告します。知能ロボットプロジェクト3回生後藤です。結果は競技の順位とモデル図のA、B、C、Dで評価されます。
自由工房entryチームは競技順位が4位、モデル図は未提出のため評価はなしという結果でした。
自由工房primaryチームは競技順位が11位モデル図の評価は最低のD評価でした。活動の中であまりモデル図の勉強や作成の時間を割けなかったのが原因です。
自由工房Advancedは地区大会の結果が発表されていないためモデル図の評価、順位ともに発表がありません。モデル図は間に合わなかったため未提出です。
今後は各チームに分かれて知能ロボットコンテスト部内大会に向けて活動する予定です。