
「知能ロボコン」カテゴリーアーカイブ
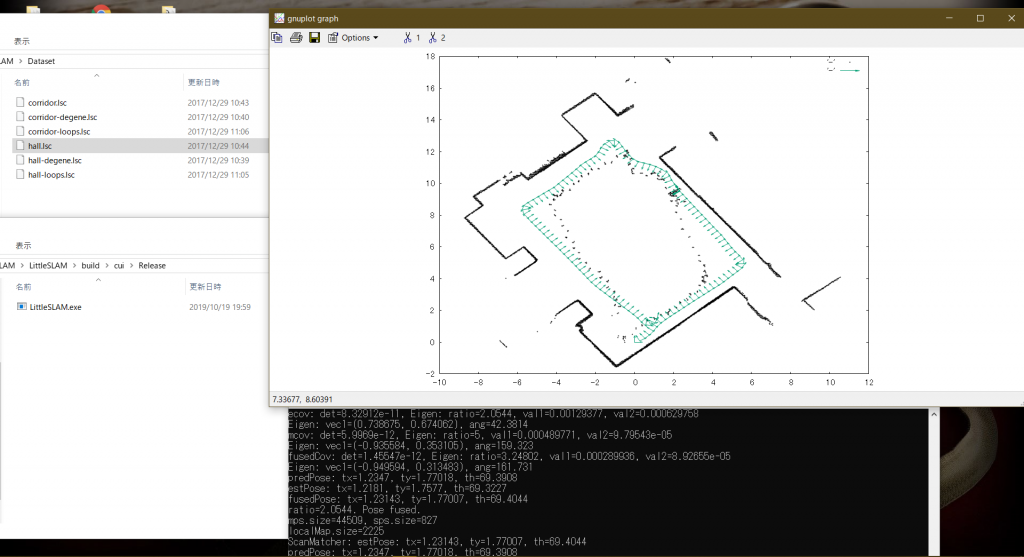
SLAMの環境を導入しました。
SLAMの環境を構築しました。SLAMを使うと広範囲距離センサからマッピング、そのマップから自分の位置を割り出すことができます。この技術を新たに挑戦するプロジェクトに使用するつもりです。
カテゴリー: 知能ロボコン
Raspberry Pi 4 を購入しました。
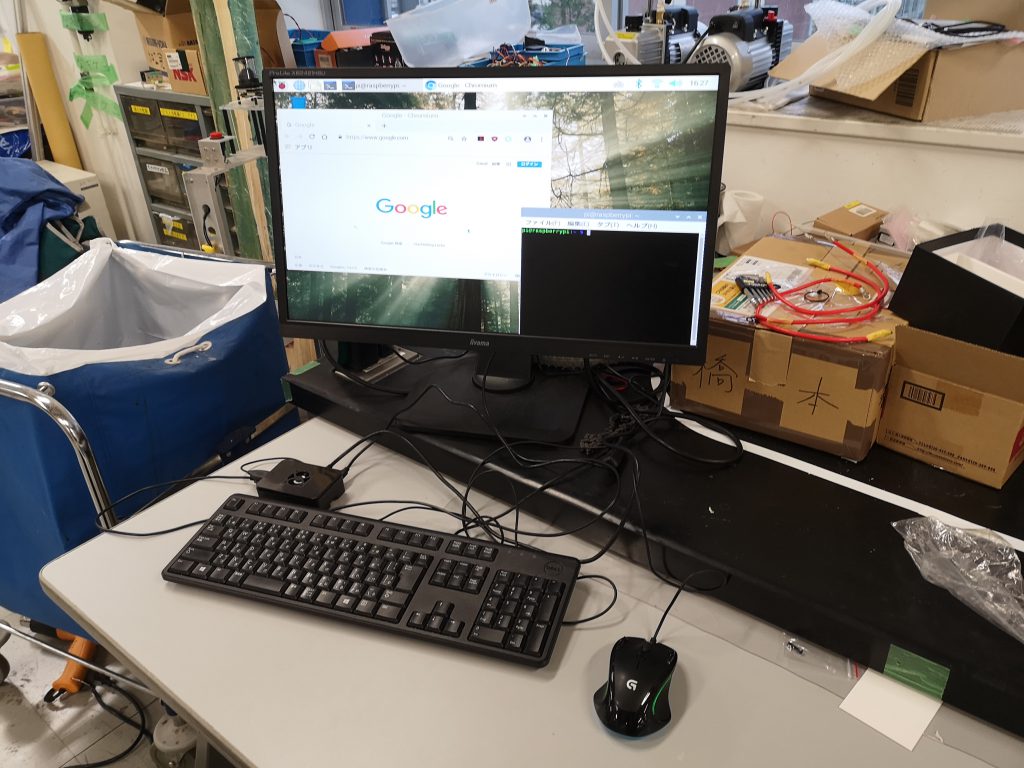
発売されたばかりのRaspberry Pi 4の4GB モデルを購入しました!知能ロボットコンテスト用のロボットに搭載したいと考えています。画像処理やRobot Operating Systemの処理に使用する予定です。

カテゴリー: 知能ロボコン
深度カメラを使用して点群表示ができるようになりました。
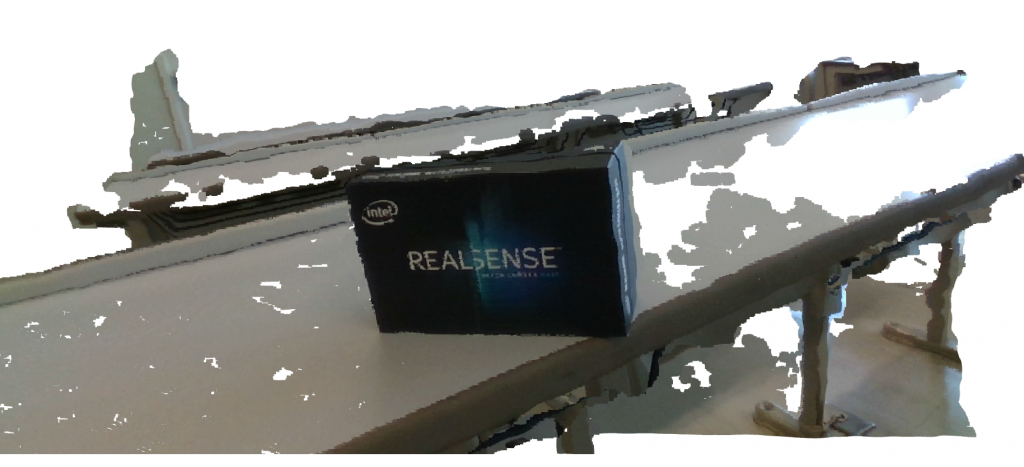
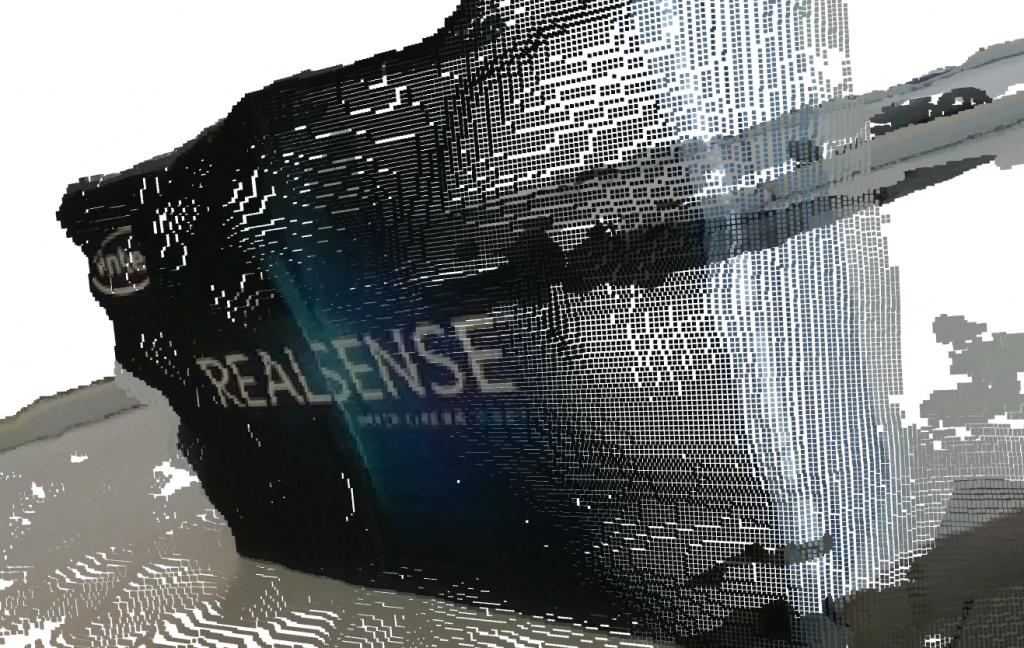
深度カメラのRealSense D435とOpen3Dを使って点群表示ができるようになりました。
今後はRANSACを用いた平面除去で、机の上にある物体を検知したいです。
カテゴリー: 知能ロボコン
ライントレースロボットが完成しました。
一年生のライントレースロボットが完成しました。このロボットでプログラムの基礎を学びます。
来年の知能ロボットコンテストに生かせるよう、頑張ります。
カテゴリー: 知能ロボコン
来年に向けて
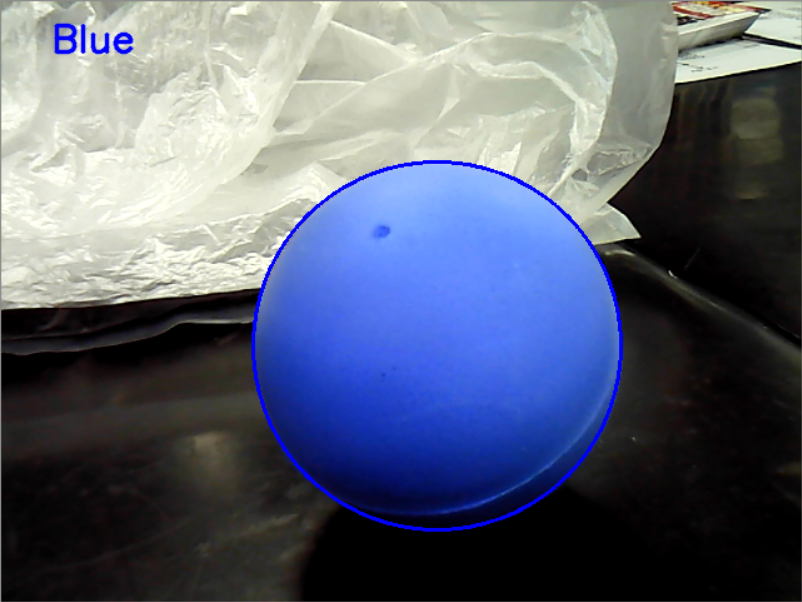
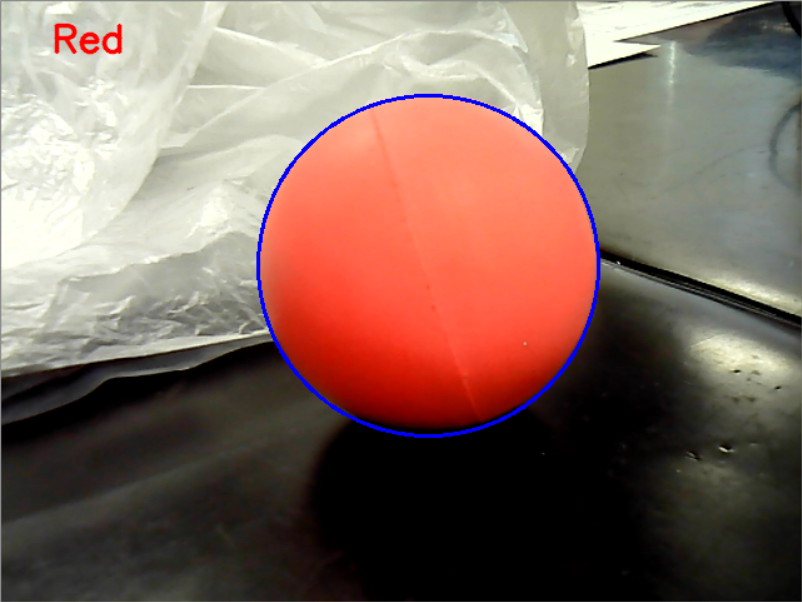
今年の大会では結果が振るいませんでした。しかし、来年の大会に向けて新しい技術を取り入れているところです。上の画像は画像処理でボールの色を認識しているものです。こうした技術を扱い、来年こそは結果を残したいです。
カテゴリー: 知能ロボコン
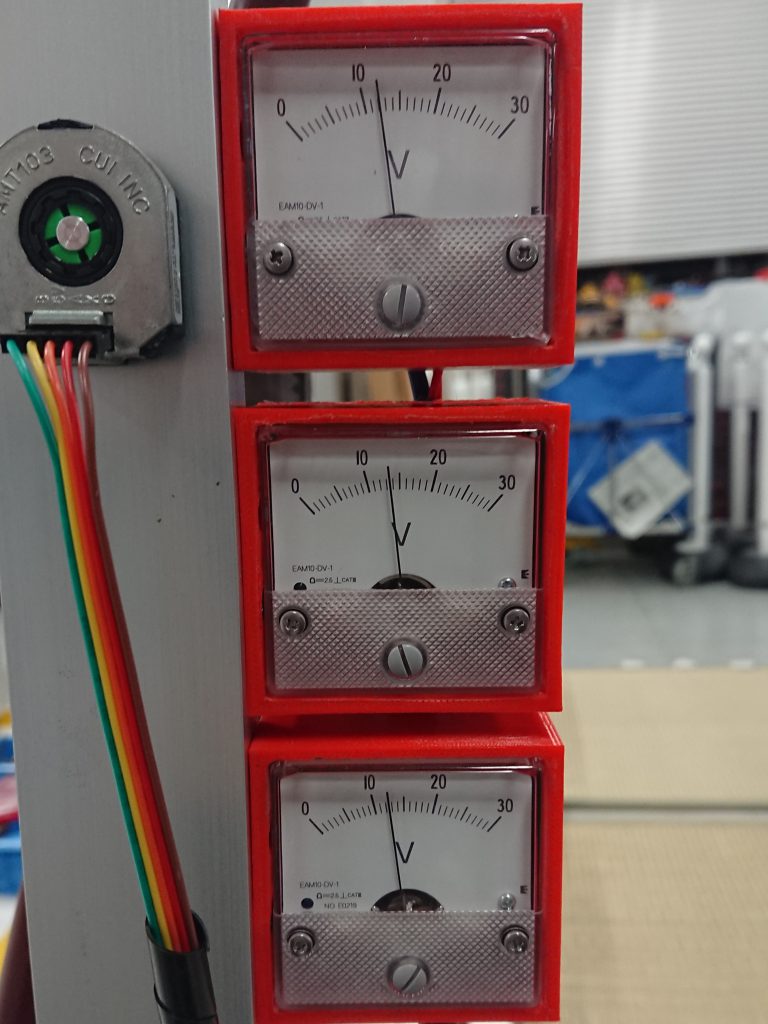
電圧計を取り付けました。
電圧計を取り付けることでロボットのバッテリー残量を容易に確認できるようにしました。取り付けた理由は、ロボットが不振な挙動をした際の状況確認をスムーズに行い、速やかな原因究明を実現するためです。
カテゴリー: 知能ロボコン
新アームが完成しました
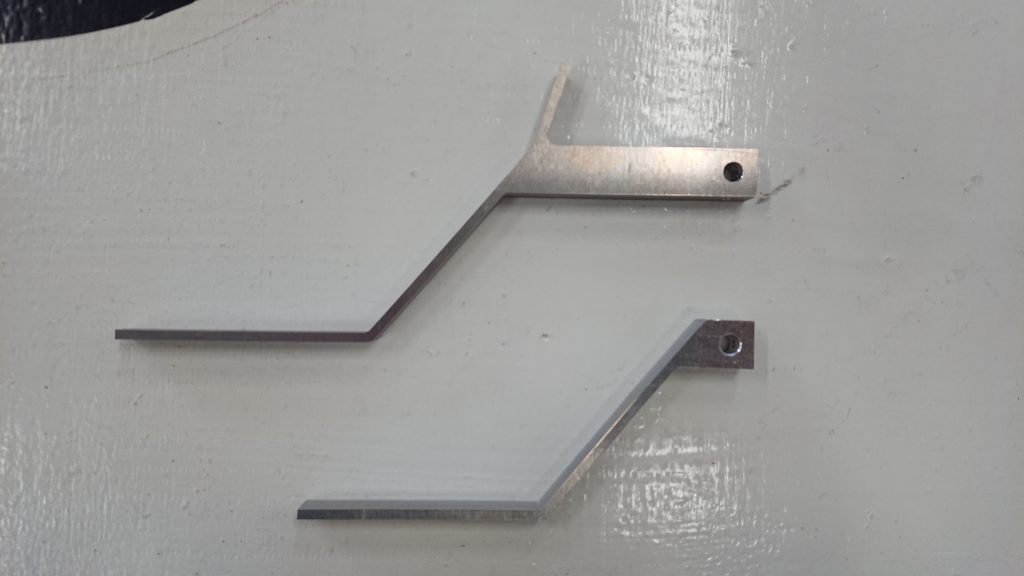
新アームが完成しました。画像の上のアームが新しい方で、下が古い方になります。見ての通り少し長くなり、上に出っ張りが付きました。この出っ張りのおかげで、投球機構のカップにスムーズに入れることができます。
カテゴリー: 知能ロボコン
配線を綺麗にしました
edf 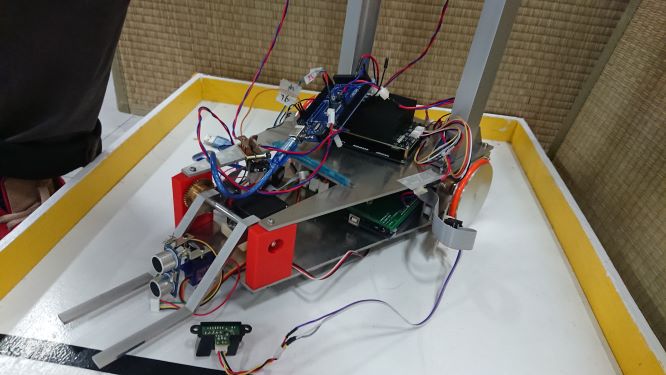
左側が配線をまとめた後、右側がまとめる前です。
センサーやモーター等の配線を基盤にまとめ、モータードライバーの下に設置したことで、配線がスッキリしました。
カテゴリー: 知能ロボコン
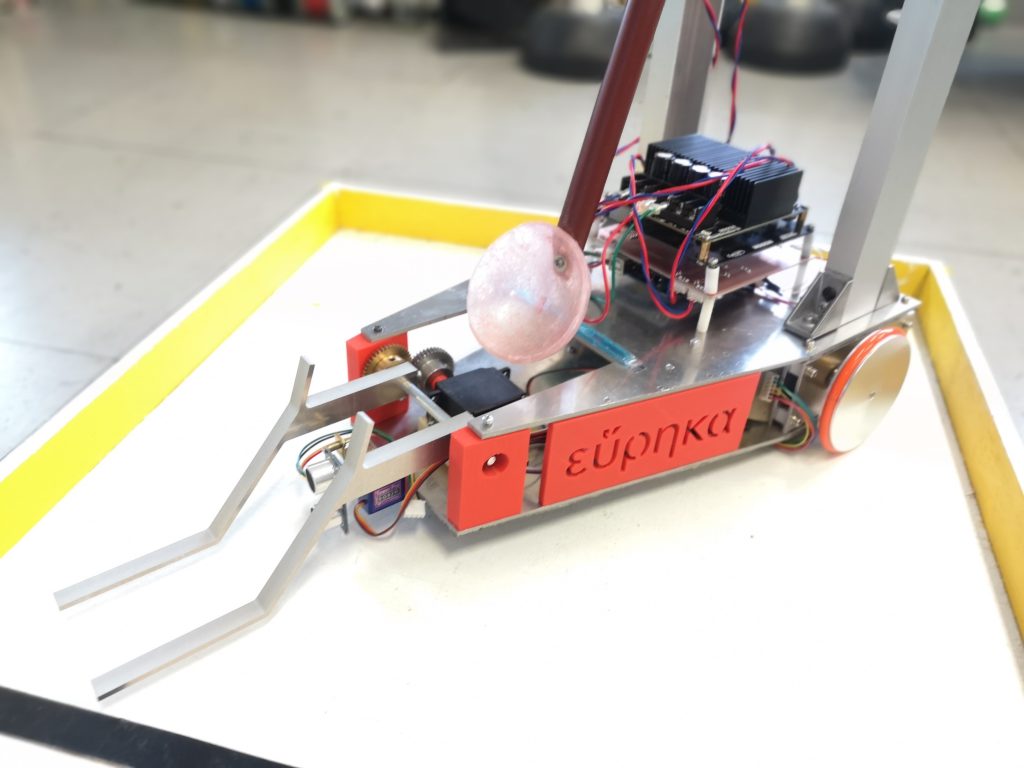
投球機構ができました
自分達のロボットの最大の特徴となる投球機構が完成しました。
実際に動かしてみたところ上手く飛んだので、大会では実際にゴールに入れられるように制度を上げていきます。
カテゴリー: 知能ロボコン
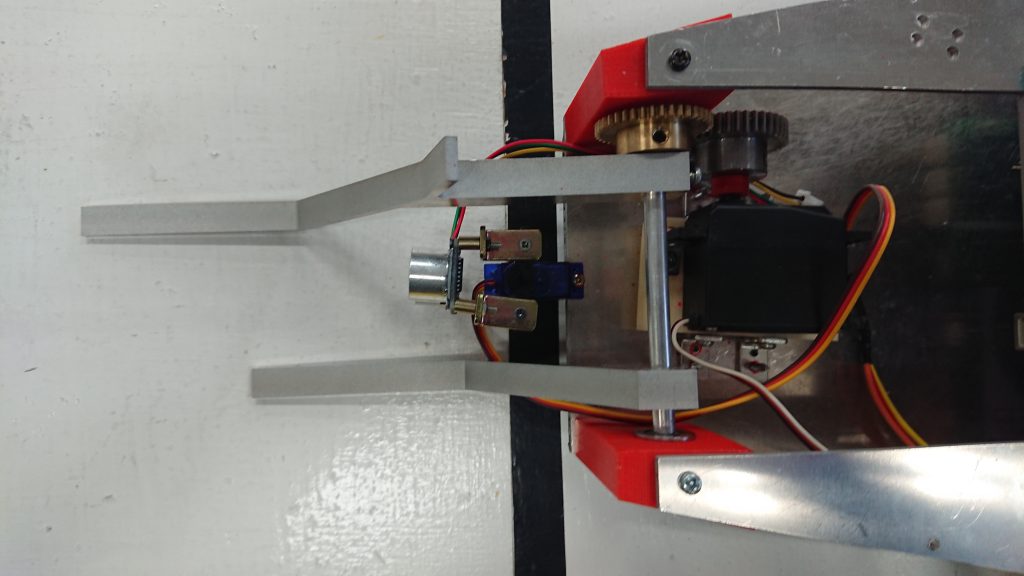
アーム完成しました。
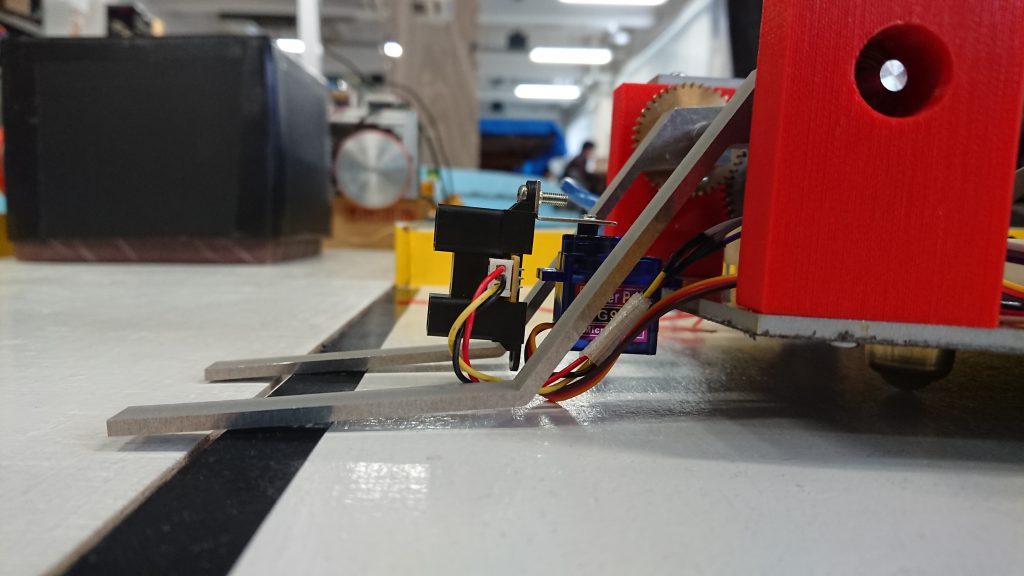
写真に載っているフォークリフトのツメの様なものは、ボールを掬い取るためのアームです。しかし、実際に機体に取り付けてみると、アームがボールを取った際に、センサーが干渉してしまう不具合を発見しました。現在新アームを設計しています。
カテゴリー: 知能ロボコン