
「知能ロボコン」カテゴリーアーカイブ
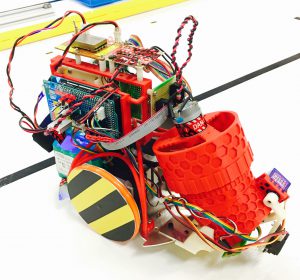
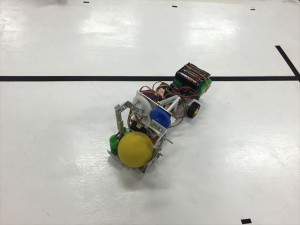
ロボット(neo : マキシマ)完成
Arduinoに12Vのバッテリーを繋げてしまい、過電圧で回路基板を壊してしまいました。センサー類は無事でしたが、モータードライバとArduinoが動かなくなりました。故障してしまった部品を取り替え、回路も作り直しました。今は、ボールを全て取れるようになりました。これから調整に入ろうとおもいます。また今回を反省し、今後は気をつけます。(井堀幸祐君:電子機械工学科2年)
カテゴリー: 知能ロボコン
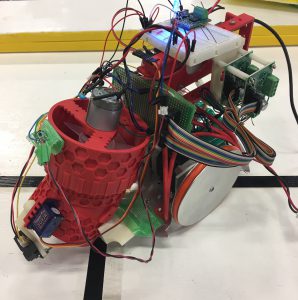
機体全体の組み立て
今週はロボットの機体全体を組み上げました。基盤ケースとその柱の部分は設計したものを3Dプリンターで作っていただきましたが、設計ミスで吸引機と車体盤間の接続がうまくいかず、また製作しようと思います。実際に動かす段階に入りたかったので、モータードライバの並列回路を基板作りました。ですが実際に走らせてみると、車輪半径が大きいため少しトルクが足りないようでした。来週はそれらを改善します。(井堀幸祐君:電子機械工学科2年)
カテゴリー: 知能ロボコン
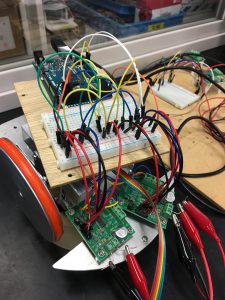
足回り
僕たちのロボットの移動にステッピングモーターを使おうと考えています。そのステッピングモーターで動かすためのモータードライバをL6470にし、デイジーチェーン接続させました。先輩の協力もあり、回転方向と連続回転ができるようになりました。これからの目標は、ライントレースができるようにすることです。(井堀幸祐君:電子機械工学科1年)
カテゴリー: 知能ロボコン
軽量化に成功
加工センターに依頼していた新型吸引機が無事に出来上がりました。完成度は高く、-65.9グラムの軽量化に成功しました。また、風量も以前より多く、振動も全くありませんでした。1番良かったのが電流です。以前は吸引に負荷がかかりすぎて3A以上の電流が流れてしまいましたが、2.6Aまでにすることができました。(井堀幸祐君:電子機械工学科1年)


カテゴリー: 知能ロボコン
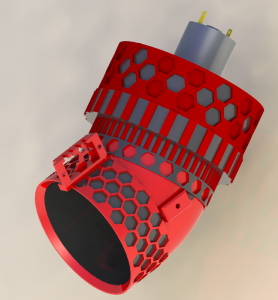
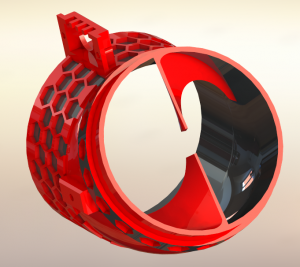
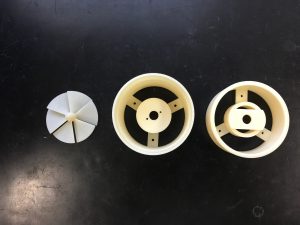
新型吸引機の設計
新型吸引機の設計をしました。
主に軽量化を目的とし、このような構造にしました。ただ薄くするのではなく、ハニカム構造をモチーフに削り取りました。以前の吸引機は筒の部分の振動が大きかったので、固定部分を前方に改良しました。これも3DプリンターのABS樹脂で製作してもらいます。(井堀幸祐君:電子機械工学科1年)
カテゴリー: 知能ロボコン
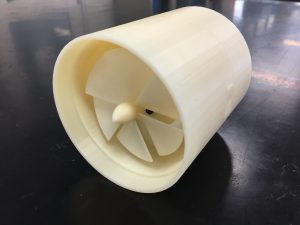
吸引機の製作結果
完成した3Dデータを大学の加工センターに依頼し、3Dプリンターで製作していただきました。実際に試したところ、風量に問題はありませんでした。この結果を元に、これから大会に向けてバード全体を完成させたいと考えています。(井堀幸祐君:電子機械工学科1年)
カテゴリー: 知能ロボコン
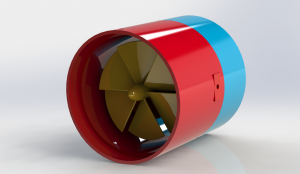
吸引機の部品設計
12月にsolidworksの学習し、1月から6月の大会に向けて、ボールを取るための吸引機を設計しました。前方部分をはめ込み式にして長さを調節できるように設計しています。(井堀幸祐君:電子機械工学科1年)
カテゴリー: 知能ロボコン
PCで画像処理
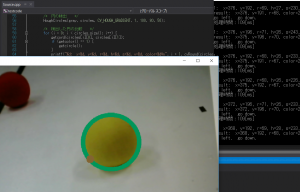
ラズパイの処理能力不足の対策として、PCで処理させる事になりました。ということで、画像処理をPCの方に移植し、ついでに処理時間も計測しました。
また、ロボットとは無線通信をしようと考えているので、そのプログラミングもしています。が、画像を見て分かるように、送受信したデータがおかしくなってます。今のところは原因が不明です。(漆原宏丞君:電子機械工学科1年)
カテゴリー: 知能ロボコン
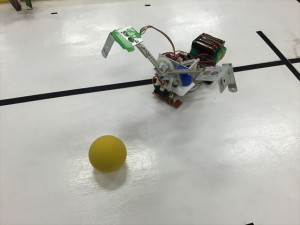
ボールの探索
ライントレースカーに距離センサーを付け、ボールを見つけることができるようになりました。適切な距離に近づき、アームを動かしてボールを取るプログラムを書きました。しかし、取ったボールが競技台にこすれてしまうのでハードの改良をしていきます。(二瓶悠介君:電子機械工学科1年)
カテゴリー: 知能ロボコン
エンコーダーでの制御
エンコーダーの制御をやりました。A相を基準として見ることで正転か逆転を読み取っています。これをしっかり理解して三輪移動で自己位置推定がしっかり出来るようにしていきます。(前田直樹君:電子機械工学科1年)

カテゴリー: 知能ロボコン