「知能ロボコン」カテゴリーアーカイブ
検出時間の短縮
今回は、一番大きく映ってるボールの中心座標と指定座標(今回は画像の中心)を比較してボールの中心座標をどう動かせば指定座標と重なるかを出力させました。
また、処理時間を少しでも短縮するためにしきい値を調節して、検出数を減らしました。検出数が1個になるようにしても良かったのですが、誤検出した時や、検出できなくなったときに困るかもしれないので、そこまで厳しくはしていません。
※「result」ウィンドウの真ん中当たりの青っぽい四角の中が比較に使った範囲です。実際にロボットで動かす時にピッタリ重なるようにするのは難しいので範囲をつけて、判定を少し緩くしています。(漆原宏丞君:電子機械工学科1年)


カテゴリー: 知能ロボコン
近くにあるボールを検出
前回たてた目標を変更して、まずは自分に一番近い、つまり一番大きく写っているボールの検出を試しました。
画像のように、一番大きく写っている(各画像の下の方に書かれているrの値が一番大きい)ボールが検出できています。誤検出も多少ありますが、今のところは問題なく処理できています。
次は、検出したボールを回収するために、ボールが指定座標とどれだけ離れているか、また上下左右どの方向に動けば合わせられるかの処理をさせたいと思います。(漆原宏丞君:電子機械工学科1年)


カテゴリー: 知能ロボコン
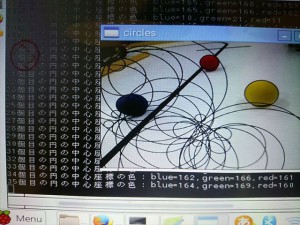
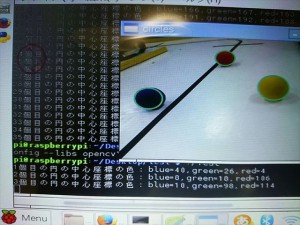
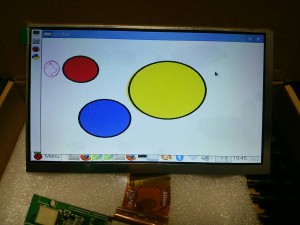
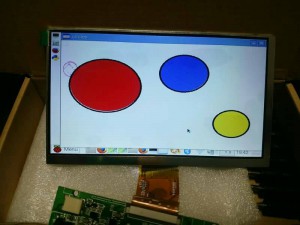
ラズパイでボール検出
前回の画像をPCでのディスプレイに表示させて、それをラズベリーパイ(今後はラズパイと呼びます)に繋いだusbカメラで読み込み、円検出をさせました。が、動画になるのでデータは無し。結果はちゃんと動きました。ですが、一枚目画像を見て分かるように、黒い円が30個以上検出されています。これのせいで、前のusbカメラの処理がとても重かったです。なお、この画像で使用したのは静止画です。この検出結果を出力するだけでも10秒近くかかっていました。
それを、しきい値をいじって調整したものが二枚目の画像です。ちゃんとボールだけが検出できています(緑の円がそれです)。
次に、検出できた円の中心座標の色を取得するようにプログラムを書き換えました。画像を見て分かるように、検出した円の中心座標の色も取得できました。
次の目標は、これをusbカメラの映像を使って使えるレベルで動くように改良する事と、各色のボールが、画像の中にいくつあるかをカウントする所までを考えています。(漆原宏丞君:電子機械工学科1年)
カテゴリー: 知能ロボコン
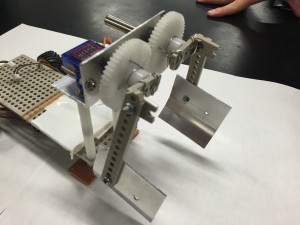
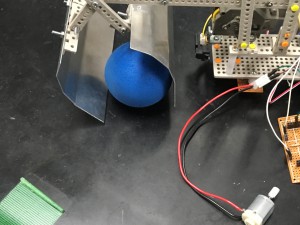
アームの機構
ここ2週間でリンクを使うアームを取り付けました。このアームは前に重心がありアームが重いため後ろに重りを乗せる必要がある事が分かりました。また、モーターが一個でトルクも足りる事も分かりました。(前田直樹君:電子機械工学科1年)
カテゴリー: 知能ロボコン
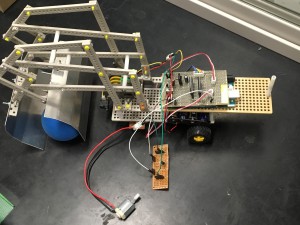
これからの課題
実際にライントレースさせることで様々な課題が見えてしました。まず距離センサーの位置が不安定なため、ボールを認識できなかったこと。プログラムをtimeで動作を変化させているため、ハードの出力に支障がでれば全体的に不安定な動きになってしまうことです。…
これからの課題につきましては、まず、ハードの完成です。ボールを持ち上げる装置も製作しようと考えています。(井堀幸祐君:電子機械工学科1年)
カテゴリー: 知能ロボコン
ボールの検出
ボール検出のテストをしました。画像のように、競技用のボールを模した赤、青、黄色の円がちゃんと検出できています。黒い丸で囲ってある部分です。次は、今回使った画像をディスプレイか何かに表示させ、usbカメラなどで撮影しながら円を検出できるようにしたいです。(漆原宏丞君:電子機械工学科1年)
カテゴリー: 知能ロボコン
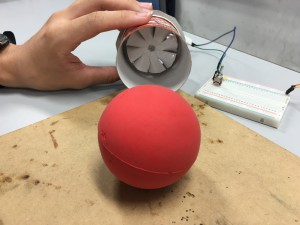
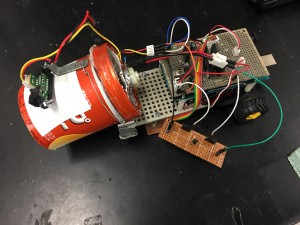
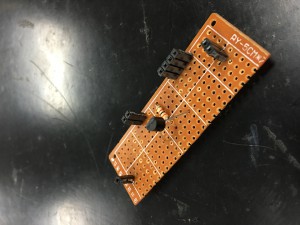
ファンを制御するための回路製作
自作吸引機をArduinoで制御するため、トランジスタを使った回路を製作しました。動作確認ができたので、プログラムを書き込んでいきます。(井堀幸祐君:電子機械工学科1年)

カテゴリー: 知能ロボコン