
「レスコン」カテゴリーアーカイブ


タイヤ変更
タイヤ幅を40mmから30mmに変更しました。タイヤの大きさを変えると、グリップ力が減少し走行状態が変わるので、プログラムも調整していきます。(三原和也君:通信工学科1年)
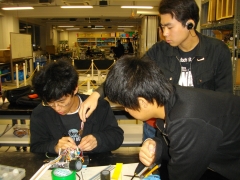

アームパーツ
半分くらいアームのパーツが完成しました。残り半分を来週につくり、仕上げる予定です。写真は、鹿島健吾君(電子機械工学科2年)に加工してもらったパーツです。(中井智貴君:電子機械工学科2年)





ヒト型レスコン反省会
予選でロボットが動きませんでした。午前中の練習では調子よく動いていて、5分でゴールできていたのに、競技開始直前にコントローラーの指示を全く受け付けなくなりました。他の出場者からアドバイスをもらったところ、原因は、コントローラーから無線でマイコンへ指令を飛ばす際に、バグがあるらしいです。

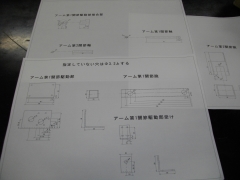
ロボットアーム
3週間前にアームを完成させる予定でしたが強度不足で、計算し直し、設計図が完成しました。コンセプトは、1kgのガレキが持てること。軸数は5個あります。
入部先生に教えていただいた計算式で設計しました。(中井智貴君:電子機械工学科2年)

マシン調整
振動によってネジが緩むので、ワッシャーをはさんでマシンの強度をアップしました。前輪のモータギアがかみ合ってなかったので、外しました。S字やクランクでの脱輪が多いので、プログラムを調整しました。(三原和也君:通信工学科1年)


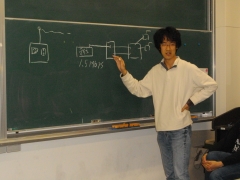
ヒト型レスコンのモーション
来週末のヒト型レスコンに向けて、モーションの作りこみをしています。トンネル潜り、台座乗り換え、ガレキ除去、ダミヤン救助・搬送までの基本的な動きを実装しました。(鮫島智樹君:電子機械工学科1年)



