「レスコン」カテゴリーアーカイブ
定例ミーティング
安慶名将君(電子機械工学科3年)が開発スケジュールや進捗の報告にパワーポイントを導入しました。パワーポイントの活用についても、活発な意見がでました。


薦田先生からのメッセージ
安慶名君が、スケジュールをプロジェクタで発表してくれましたが、開発の進捗管理には、通常ガントチャートを使います。一覧性がよくなるので、そういうツールの使い方にも慣れてください。
4月から自由工房を見てきて、残念に思うのは「モノが動いていない」ということです。モノ作りをしていたら、常に動くものがあるはずなのに、それがないのが私から見ると不思議です。
「機体ができてからら動かす」という考えでいるのかもしれません。しかし、それでは効率のいい開発ができません。
1台のロボットは、足廻りの機構やアームなど、いくつものユニットに分けられるでしょう。ユニット毎に試作をして動かして、問題点を早めに見つけ改造してどんどん
作業していかないと。
複雑に動くアームとか、強度や耐久性が心配なら、その部分だけ長時間動かしてみるというテストは早めにしておく方が絶対いいです。
ユニット単位でロボット開発をするのであれば、スケジュール管理が重要になります。そういう場合には、先ほどいったガントチャートで、作業項目を細かく書き出し担当毎の進捗と、全体の進捗をしっかり管理する必要があります。
スケジュールがちゃんとできていれば、チームで並列で作業ができます。日程管理をして効率のいい作業をしていってほしいと思います。

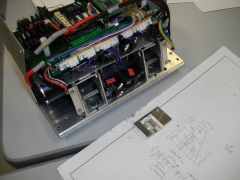

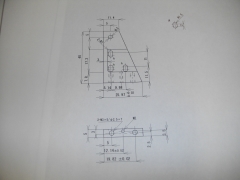
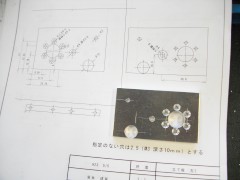
新型機設計図
薦田先生に設計図を添削してもらいました。煩雑な線は減らして、穴間の距離などを書くようにアドバイスをもらいました。そのように図面を引きなおしました。
(魚井成晃君:機械工学科2年)
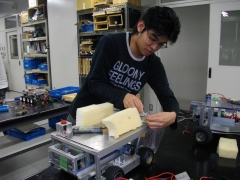
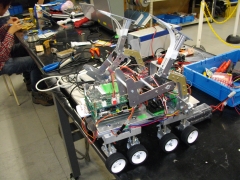
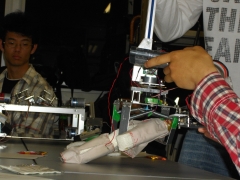
S2号機:ハンド完成
ハンドが完成しました。現状で、レスコンボードと接続して動作確認が済んでいます。来週は本体に搭載し配線を完了します。(芝 和亮君:電子機械工学科3年)


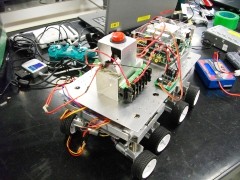
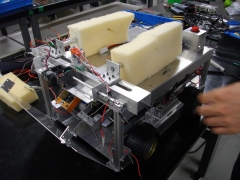
S3号機:走行実験
配線が終わって、簡単な走行実験をしました。3kg重量搭載状態で、サーボモータの動作確認と直進走行をチェックしました。配線ミスがあったので、レスコンボード搭載でのテストはこれからになります。(中森智史君:電子機械工学科2年)