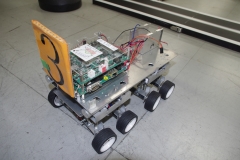
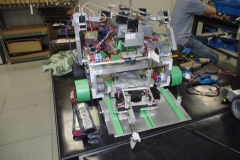
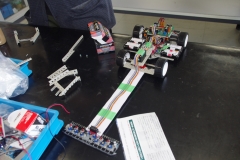
予選ではスライドのように配線が汚かったので、一旦、総バラして組立て直しました。設計時の計画通りに基板をボディのスリット内にいれ、配線の見た目をすっきりとキレイにしました。(中森智史君:電子機械工学科2年)

予選ではスライドのように配線が汚かったので、一旦、総バラして組立て直しました。設計時の計画通りに基板をボディのスリット内にいれ、配線の見た目をすっきりとキレイにしました。(中森智史君:電子機械工学科2年)
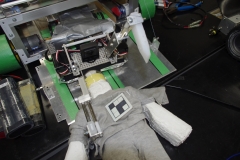
子機アームの爪を短くしました。救助練習をしたところ、爪を短くしたことでダミヤンの救助がしやすくなりました。(鹿島健吾君:電子機械工学科2年)
第2回ロボット相撲練習会を実施しました。今回は外部から2名が参加してくださいました。お2人が上位に入っています。自由工房メンバーも気を引き締めて頑張りたいと改めて思いました。詳細レポートは、コチラ
です。


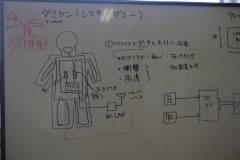
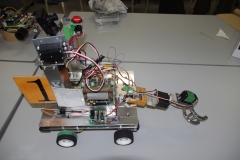
予選のとき、1軸だったアームを2軸に変更しました。後部にダミヤンの音声収集をするためのマイクを取り付ける予定です。(中井智貴君:電子機械工学科2年)
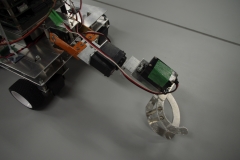
中井先輩(電子機械工学科2年)から「先読みセンサのアームが長すぎる」と指摘をいただきました。長いとサーボに負担が大きくなるし、振幅を大きくなってしまいよくないそうです。自分のマシンに最適な長さを模索したいです。(三原和也君:通信工学科1年)

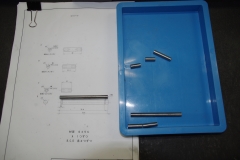
ボール盤を使って、穴あけをします。直径3mmの穴を開けたくて、3mmのドリルをセットしたら、「1.2mm、2.0mm、2.5mm、3.0mmと少しずつ穴を大きくするように」と清家先輩に(メディアコンピュータシステム学科3年)に注意されました。


ギアをつけるための軸を作りました。さび取りをして、長さを調整しました。これで足回りが完成したので、来週からボディの板金にはいります。(池田紘彰君:電子機械工学科1年)

7月24日のオープンキャンパスでデモンストレーションを披露するロボットの調整中です。Robovie-Xにつけてあった足裏が大きくて(なぜか、Robovie-X Liteの足裏がついてます)、うまく動かないので、ほかの足裏にするかモーションで調整するか検討中です。(杉本大樹君:メディアコンピュータシステム学科1年)