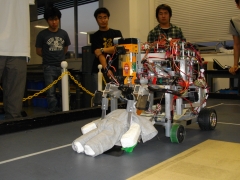
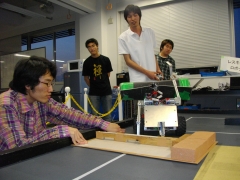
審判を2人置いて、3台のロボットを各オペレータが操縦して協働でダミヤン救助の練習をしました。現時点では、目視コントロールしていますが、1台が7分台でダミヤン救助に成功しています。





審判を2人置いて、3台のロボットを各オペレータが操縦して協働でダミヤン救助の練習をしました。現時点では、目視コントロールしていますが、1台が7分台でダミヤン救助に成功しています。
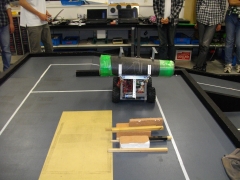
ガレキの上にカバーを広げ、通路を確保する機能です。デモでは、うまく通路が広がりませんでした。操縦でガレキとの位置取りも必要だし、開くための機構を再検討する必要もありそうです。(高橋裕一朗君:情報工学科3年)
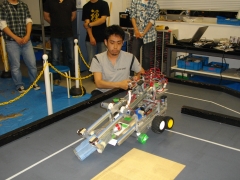
上から2本のアームを伸ばしてダミヤンを確保。ダミヤンの上半身を持ち上げた下に、ベッドを差し込んで救助します。救助中に、片方のアームのケーブルが抜けてしまいました。対策が必要です。(齋藤佑一君:電子工学科4年)
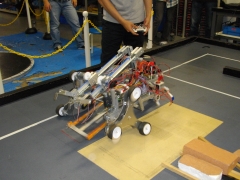
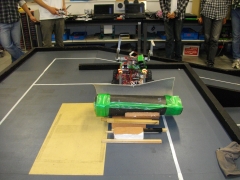
中央のアームで倒柱ガレキをわずかに持ち上げ、左右のアームを下に差し込んで、倒れているガレキを持ち上げます。(高橋裕一朗君:情報工学科3年)

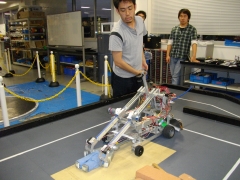
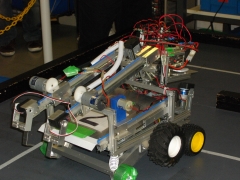
このロボットは車高調整ができるのがポイントです。救助方法は1号機と同じです。アームは左右別々に動き、先端の角度も変えられるので、ダミヤンの姿勢に適切に対応できます。(齋藤佑一君:電子工学科4年)
ダミヤンの下にベッドを差し入れてから、アームでダミヤンを引き込む形式です。ダミヤンを保護した後、重みでベッドを支えている紐が切れてしまいました。強度を考えた修正が必要です。(齋藤佑一君:電子工学科4年)

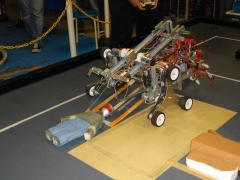
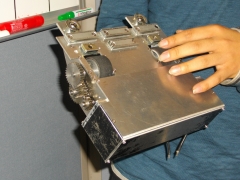
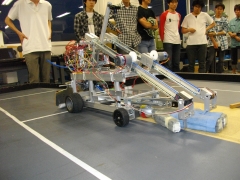
ベッドをダミヤンの元へ差し出し、伸びたアームでダミヤンの脇を保持して、ベッドに引き上げます。ベッドにダミヤンが乗ったら、コンベアでロボット本体内に収容し、搬送します。(廣澤勝成君:電子機械工学科2年)