「マイコンカーラリー」カテゴリーアーカイブ
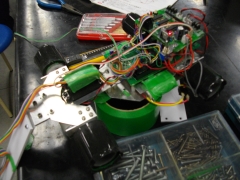
ポジションセンサ搭載
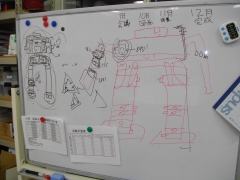
先読みセンサの下にポジションセンサを搭載しました。横滑りを検出し、カーブでマシンが外に膨らんだ時に、ブレーキをかけてハンドルを切り軌道を補正します。今は、スピードを落とさないと安定走行できないので、今後、スピードを上げても対応できるように調整していきます。(中井智貴君:電子機械工学科2年)

マシン整備
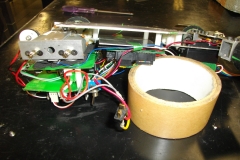
12月3日に、先輩にマシンをチェックしてもらうので、一度機体を全部バラして組立て調整しました。シャーシーが曲がっている部分を見つけました。(魚井成晃君:機械工学科2年)

全国大会出場決定!
池田紘彰君(電子機械工学科1年)が、第23回全日本ロボット相撲大会の出場権を獲得しました。今年もいい成績を納めてくれることを期待しています!

カーブが安定しました。
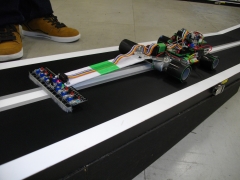
マシンを調整して、カーブを安定して走れるようにしました。2月16日の自由工房杯ままでに、安定性と完走率をもっと向上させたいです。(大西祐喜君:通信工学科1年)

定例ミーティング
11月6日のマイコンカーラリー練習会に備えて、自由工房内に37.8mのコースを設営しました。ミーティングは、机を隅に寄せて行いました。斉藤さんから山口のお土産をいただきました。

薦田先生からのメッセージ
問題解決は、あるべき姿に対する現状の問題を理解するのが、第一歩です。
マイコンカーラリープロジェクトから「ダイオードが壊れた」と報告があったけれど、話を聞いていると原因も分からず、本当にダイオードが壊れているのか判断もできない状況です。
ロボットの構成の全てを理解するのは無理でも、わかる部分を少しずつ増やしていかないと、いつまでたっても問題解決ができないままです。
今の状態は、ブラックボックスが大きすぎます。
来年に向けて、ロボットの安定性を上げたい。新型マシンを設計したいというが、
安定性を向上するために、何をしたらいいのか?
スピードアップするためにするべきことは?
開発に必要な要素がわかっているのか?
わからないまま作業を進めても、計画を立てることはできないし、トラブルが起きた時に対処もできません。
問題解決の方法を、ひとつひとつ覚えていってください。
組立て開始
初めて、ロボットの組立てに挑戦します。バイトがあって、なかなか活動時間が取れないけど、こつこつ仕上げていきたいです。(川口智大君:メディアコンピュータシステム学科1年)


ケーブルが足りないっ
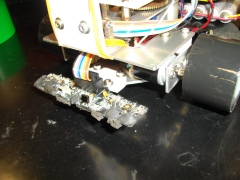
足サーボが壊れたので、交換しました。ケーブルの長さが足りなくて、配線ができません・・・。延長ケーブルをつけました。(榧木方俊君:メディアコンピュータシステム学科2年)

新メンバープロジェクトコンセプト会議
新メンバーで作るロボットのコンセプトを決め、スケジュールを具体的なマイルストーンに落とし込むように、先輩からアドバイスをもらいました。最終目標を明確にして、部品発注からやるようにといわれました。(杉本大樹君:メディアコンピュータシステム学科1年)