「レスコン」カテゴリーアーカイブ
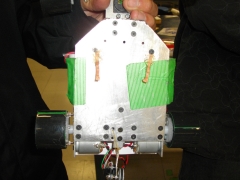
リセットの原因
ピニオンギアとギアの噛み合わせが悪く、通常よりも高い電流が流れているために、リセットトラブルが起きていると判明しました。(三原和也君:通信工学科1年)

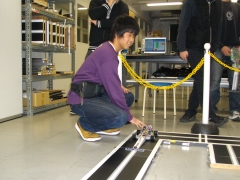

スタートセンサー
スタートバーセンサーにプログラムが対応していなかったので、修正しました。前に障害物がある間は静止していて、除くとスタートします。走行スピードは3.5m/sを目指しています。(安慶名将君:電子機械工学科3年)
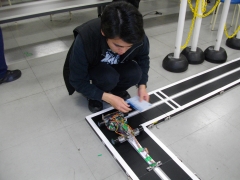





センサ異常
走行中にセンサ異常でマシンが停止してしまいます。安慶名先輩(電子機械工学科3年)にチェックしてもらったところ、シリコンテープとコースの摩擦で静電気が発生し、ボディに帯電しているのが原因と言われました。対策として、アースをつけて静電気を逃がします。(三原和也君:通信工学科1年)

センサチェック
敵発見のセンサが正しく機能しているか、動作確認中です。ロボットの動きから、プログラミングがどう動いているのか読み取るには、習熟が必要だと感じました。(魚井成晃君:機械工学科2年)

足の設計
足パーツの設計を担当しています。9月末に始めたけれど、そのあと放置していたので進んでいません。もう少しで図面が出来上がります。(藤本将登君:メディアコンピュータシステム学科1年)