「活動報告」カテゴリーアーカイブ
デモ機を作成中
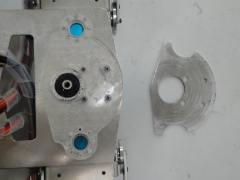
最初シャーシーをカーボンで作ろうとして失敗しました。アルミ作り直しました。 CNCで切り出すのに12時間かかりました。ギアボックスは藤江啓太君(電子機械工学科2年)に作ってもらいました。(大西智之君:電子機械工学科2年)


スケジュール管理(先輩からのアドバイス)
僕が社会人になって感じたのは、仕事をする上では納期厳守が鉄則ということです。
仕事では、納期にギリギリで完成すればいいわけえではありません。思わぬトラブルが起きる可能性を考えて、余裕をもって取り組みます。
そのために各工程をバラして回路やプログラムの開発やテストに必要な工数も見積もります。
それを元に開発スケジュールを立てて仕事をしていきます。
自由工房は、仕事とは違って、品質と原価は自分で決めることができます。だけど、納期は厳密に決められています。
コンテスト開催日は、絶対に守らなければいけない納期です。大会当日に、ロボットが完成すればいいわけではありません。
社会人になって半年たってみて、「自由工房にいる間に、スケジュール管理の習慣をつけておけばよかった」「部品発注を計画的にやる意識を持てばよかった」と強く思います。それは仕事で必ず役に立つスキルだし、今のロボット開発でも重要だからスケジュール管理は必ずやった方がいいです。(奥田友彦さん:OB)

カテゴリー: 活動報告
救助班
アーム先端の爪のモデルを作ってみて、先端がとがりすぎているのがわかりました。来週は、もう少し丸みをつけて実寸大の爪先を作ります。他の形状も試作します。(能㔟賢人君:工学部電子機械工学科1年)


救助班:ベッド機構
ベッドの機構設計をしています。ベッド本体と救助するときにベッドをせり出すためのレールを切り出しました。来週までには、組み立てます。(竹村正彦君:電子機械工学科1年)


救助班:西宮北消防署に訪問
防振がどこにあるのか知りたくて、ストレッチャーを見学してきました。実物を見てみたら、とくにありませんでした。救急車の中の台車の方に、エアサスペンションが入っていました。いろいろと質問してきました。(近藤由規君:電子機械工学科3年)


ロボットの足回り機構
新規機体の構造をイラストで描きながら検討中です。走行中の振動をなくすためにどうしたらいいのか、ストレッチャーを参照にしたくて消防署に見学の申し入れをしました。(近藤由規君:電子機械工学科3年)


カテゴリー: 活動報告
試合で調整
ロボットが動くようになったので足回りの調整をして、阿部史和君(メディアコンピュータシステム学科4年)と模擬戦をしました。相手を見失ったときの処理を改良していきたいと思いました。(西原琢也君:電子機械工学科3年)


カテゴリー: 活動報告
階層構造化
マイコンカーラリーのプログラムを、階層構造化で記述するために勉強しています。参考にしたのは、こちらのサイトです。階層構造を意識して、信頼性の高いプログラムを組もう! (藤江啓太君:電子機械工学科2年)