
「知能ロボコン」カテゴリーアーカイブ


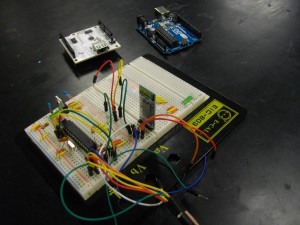
無線通信
ArduinoとTWE-Liteを使って、無線通信をしようと考えています。書籍のサンプルは動いたけれど、自分がやりたい回路をネットの情報を参考にして組みましたが、どこが悪いのか分からずに困っています。(橋本 悠杜君:情報工学科2年)

カテゴリー: 知能ロボコン
モーターを2つ制御するテスト
MEGA arduinoが届いたので、モーターを2つ制御するテストをしています。エンコーダーで距離を測定できるようにしました。(上神健二君:電子機械工学科2年)


カテゴリー: 知能ロボコン
Arduinoの勉強
今後のために、Arduinoの勉強を始めました。回路の知識がないから、全然、分かりません。MONOistに初心者向けの連載記事があると教えていただいたので、読んでみます。(藤本 創君:電子機械工学科1年)


カテゴリー: 知能ロボコン


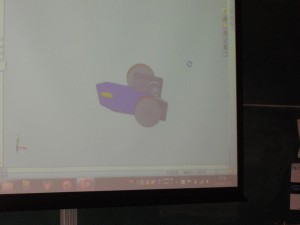
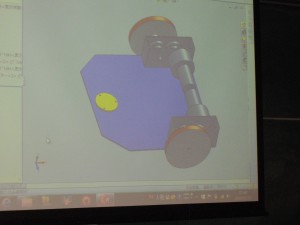
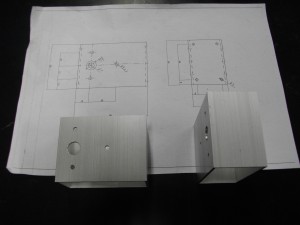
ハンドの図面
ソリッドワークスで部品を描きました。ソリッドワークス内でハンド部分を組み立てて、干渉のチェックを行いました。2月までに設計を終わらせ、部品発注をする予定です。(上神健二君:電子機械工学科2年)

カテゴリー: 知能ロボコン


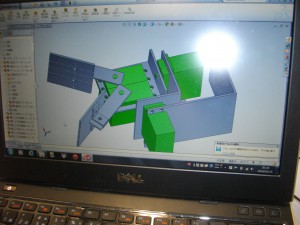
製作目標とスケジュール
ロボット製作にあたって、何を目的にして作るのか要件定義をきちんとしてから、機能、要求仕様を考え、設計に落とし込みました。(上神健二君:電子機械工学科2年)


カテゴリー: 知能ロボコン