「知能ロボコン」カテゴリーアーカイブ
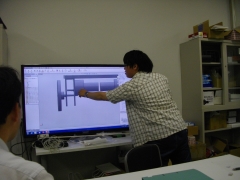
歯車のサイズとか……
今、本体の厚みを便宜上10mmで描いているので、2.5mmにします。図面で矛盾があるので、これから設計を詰めていきます。(廣田晋也君:電子機械工学科2年)

センサーアームの作り直し
自由工房のプロモーションビデオに映っている自分のマシンをみたら、走行中にセンサーアームが跳ね上がっていることに気づきました。素材の弾性が大きいためです。今のままではセンサー値を読み取れないので、カーボンで作り直します。(三原和也君:通信工学科3年)




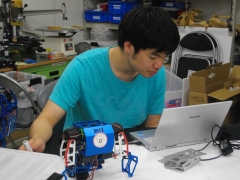
サーボの温度チェック
自分で歩行モーションを作っています。サーボの温度が上がりすぎないように温度をチェックしながら、モーションを作っています。(大野拓美君:情報学科1年)

3号機:足回りの改良
本体が組みあがり動作テストをしました。動かしてみたら、チェーンにたるみがあったので、足回りを改良しています。(清家悠太郎君:電子機械工学科2年)




近畿学生二足ロボットリーグで優勝
5月11日に関西5校の二足歩行ロボットビルダーが集まって、「近畿学生二足ロボットリーグ」を開催しました。13体が出場し、歩行競技、デモンストレーション、バトルを実施。三谷峻生君(メディアコンピュータシステム学科2年)が歩行競技で1位、バトルで全勝して総合優勝に輝きました。詳細レポートは後日公開します。


プログラム:TPIP通信
レスコンボードとの通信ができるようになりました。ロボットに搭載したカメラからの映像をモニタに表示するところを作りこんでいます。(平戸祐司君:電子機械工学科2年)

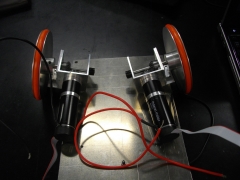
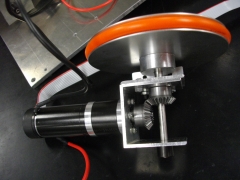
仮組から、配線加工
車軸の位置やマイコン配置の微調整をするために、仮組をしました。一度バラして、精度を出して組みなおします。モーターの配線加工もやりました。(宮本普太郎君:機械工学科2年)