
「ヒト型ロボット」カテゴリーアーカイブ
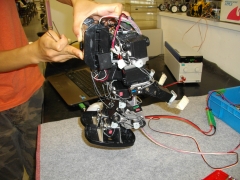
モーションの修正
救助モーションの微調整をしました。要救助者を助け上げるときに、低い姿勢を取れるようにしました。また要救助者を抱いたまま真っ直ぐに歩行できるように調整しました。断線しているところがあるので、修理してから、スタートからゴールまで通してオペレーションの練習をします。(近藤 吏君:電子機械工学科1年)

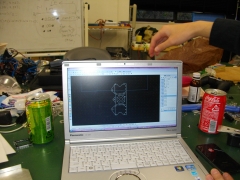

新型機の足回り
春に向けて、新型機を製作しています。「倒れなければ負けない!」というコンセプトで倒れにくい設計を考えています。足を曲げたときに膝をすくわれないように軸配置を考えました。
(三谷峻生君:メディアコンピュータシステム学科1年)

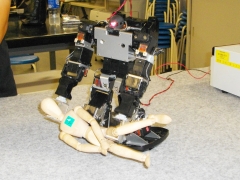
救助モード
ヒト型レスコンに向けて、モーションを作成中です。右手の向きを変えて、ダミヤンを救いあげるときに、頭を支えられるようにしました。オペレーション練習を繰り返して、他にも救助に必要なモーションがあるか確認します。(中村 介君:機械工学科2年)

ギア補修
昨日、土俵上で初めてロボットを動かしたら、ギアのイモネジが外れてしまいました。今までイモネジ1本で固定していたのを、2本にして強度を持たせます。(西原琢也君:電子機械工学科1年)


レムレース
初の自作機(足首だけがKHRデフォルト)で、ロボファイト13に出場します。ロボット名の「レムレース」は、ラテン語で亡霊の意味です。腕につけた大きな楯が特徴です。(三谷峻生君:メディアコンピュータシステム学科1年)

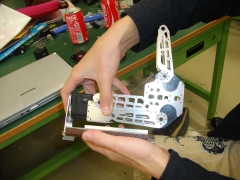
Kurara MkIII
平行リンク脚の形状を変えてリニューアルしました。フレームの厚みを1mmから1.5mmに変更。パーツ点数を減らして、部品精度を上げ安定性をアップしました。
(杉本大樹君:メディアコンピュータシステム学科2年)






