
「第10回レスキューロボットコンテスト」救命ゴリラ! B
メンバー紹介

- キャプテン
- 高橋裕一朗君(情報工学科3年)
- オペレーター
- 1号機:浦中雄太君(電子機械工学科2年)
- 2号機:廣澤勝成君(電子機械工学科2年)
- 3号機:浦野蒼士君(電子機械工学科2年)
- スピーカ
- 三輪好輝君(情報工学科3年)
プレゼンテーション資料
↑プレゼンテーションデータをpdfファイルに変換したもの - レスコンボード管理者
- 三輪好輝君(情報工学科3年)
- ヘルパー
- 芝 和亮君(電子機械工学科2年)
- ヘリテレ
- 小國翔平君(電子機械工学科2年)
出場ロボット
コンセプト
レスキュー活動の課題となる、安全と迅速な救助の両立を目指しました。そこで、レスキュー活動においてもっとも重要と考える救助機構に力を注ぎ、ロボットを開発しました。さまざまな状況を想定し、現場で臨機応変に対応するため、3台のロボットに異なる救助機構を搭載しました。
 |
1号機:The Nadeko(ザ ナデコ)ベッドの一部が展開し、ハンドがついたベッドで直接ダミヤンを救助する。 |
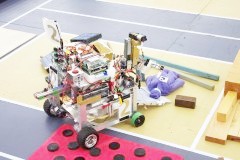 |
2号機:Mokkun(モッくん)重力によりロボットが傾いてもベッドを水平時維持する |
 |
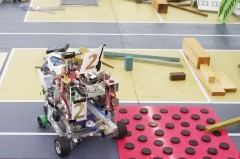
3号親機:ガッキーロボットに簡易通路を搭載。ガレキやバンププレート上に通路を展開し、他のロボットの通路を確保する。 |
ダミヤン個体識別対策
昨年は、カメラで収集した映像をもとに、コントロールルームで目視により要救助者の情報確認を行いました。しかし、緊迫したレスキュー活動中には、マークの見間違いというヒューマンエラーが起こる可能性があります。そこで今回は、画像処理によりマーカー識別するシステムを構築しました。
ファイナルミッション
 ファイナルミッションは、「救命ゴリラ!S」と一緒に第3競技に出場しました。相手チームも気心の知れたメンバーなので、競技前の作戦会議からコントロールルーム間通信を使い、打ち合わせができました。
ファイナルミッションは、「救命ゴリラ!S」と一緒に第3競技に出場しました。相手チームも気心の知れたメンバーなので、競技前の作戦会議からコントロールルーム間通信を使い、打ち合わせができました。
ガレキを除去し通路を確保する役目の3号機を先頭に、3台のロボットがフィールドに出動しました。
3号機は、連結ガレキを道の端に押しやり、倒柱ガレキを事前の申告通り3秒で起こし、2階のバンププレート上に簡易通路を展開し、他のロボットの通路を確保しました。
その間に、1号機が家ガレキの壁を外し、中から緑ダミヤンを救出。2本のアームでダミヤンを抱え上げ、上部のベッドにひょいと乗せました。そのまま素早く、ロボットベースへ搬送完了。3体目のダミヤンを救助するため、2階フィールドを目指しました。
2号機は、ガレキの下にいる紫ダミヤンの救助にあたっていました。この時、Sチームの2号機と背中合わせの体制で救助活動をしていたため、ロボット同士が接触しないよう細心の注意を払いました。万が一接触しても大丈夫なように、審判団への申告も忘れずに行いました。
ダミヤンの上に複数のガレキが被っていることと、足場が不安定なバンププレート上のため、救助活動は困難でしたが、無事、救出・搬送に成功しました。
その間に1号機は、ヘリテレカメラでも見えづらいほどガレキに埋もれているオレンジダミヤンの救出にあたっていました。救出後は、3号機が敷いた簡易通路を通り、安全にダミヤンを搬送しました。
Bチームは、競技時間を約1分残して全ダミヤンの救出に成功。その後は、Sチームの救助活動をサポートするため、再び、フィールドに出動し、ガレキ除去などを行いました。
表彰
●ベストパフォーマンス賞
●第6回竸基弘賞レスキューロボットコンテスト奨励賞
(NPO法人国際レスキューシステム研究機構)
スナップ










メンバーの感想
高橋裕一朗君(情報工学科3年)
 今回、素晴らしいチームメイトに恵まれました。(あ、昨年もよかったですけど!)
今回、素晴らしいチームメイトに恵まれました。(あ、昨年もよかったですけど!)
何が素晴らしかったか? それは、チームメンバーが増えたことで嬉しさと楽しさが増大したことです。今まで「救命ゴリラ」は、6人くらいでやってきました。そのメンバーで、団体競技としてチーム一体となり喜びや悲しみを分かち合ってきました。しかし、今年は新メンバーが多く、10人以上が参加しました。さらに、自分がプロジェクトリーダーを務めました。
本選のファイナルでは、「救命ゴリラ!B」も「救命ゴリラ!S」も関係なく、「救命ゴリラ!」チームとしてダミヤン救助に臨むことができました。今まで、精進してきた結果を発揮できて楽しかったです。
浦中雄太君(電子機械工学科2年)
 今回初めてレスキューロボットコンテストに参加しました。初参加で、ベストポイント賞など2つの賞、大阪電気通信大学自由工房「救助ゴリラ!」としては、4つの賞を受賞できとてもうれしいです。
今回初めてレスキューロボットコンテストに参加しました。初参加で、ベストポイント賞など2つの賞、大阪電気通信大学自由工房「救助ゴリラ!」としては、4つの賞を受賞できとてもうれしいです。
ファーストミッションでは、ロボットがかってに動いてしまうなどの、アクシデントがありましたが、ファイナルでは、ロボット3台が完全な状態で出場することができました。これが、ベストポイント賞などに繋がったと思います。
今回、悔いが残るとしたら、救助ゴリラでB・S合わせて、6体のダミヤン全救出を目指したのですが、残念ながら5体しか救出出来なかった点です。来年は、今回以上の結果を出すため頑張りたいと思います。
廣澤勝成君(電子機械工学科2年)
 今回、初めてのレスキューロボットコンテストに出場しました。開会式では初めての会場の雰囲気に圧倒され緊張しました。
今回、初めてのレスキューロボットコンテストに出場しました。開会式では初めての会場の雰囲気に圧倒され緊張しました。
僕は、2号機「Mokkun」のオペレーターとして活動をしました。ファーストミッション、ファイナルミッションで時間内に無事にダミヤンを3体、救助し搬送が出来たことを誇りに思います。
チーム全体としては、皆が協力し、過度の緊張もなくスムーズにミッションを完遂できてよかったです。そして、初めて出場した結果で、ベストパフォーマンス賞や競基弘賞を獲得したことが嬉しかったです。
浦野蒼士君(電子機械工学科2年)
 私は2回生ですが、今回初めて大会を経験しました。何も解らないまま始めたロボット制作ですが、レスキュー工学大賞受賞という結果が得られて最高に幸せです。
私は2回生ですが、今回初めて大会を経験しました。何も解らないまま始めたロボット制作ですが、レスキュー工学大賞受賞という結果が得られて最高に幸せです。
思えば1回生の後期、入部先生に「レスコンやってみない?」と誘われたのがきっかけでした。同じ学科の友達とこの自由工房入り、やってみるととても難しくつまずくばかりでした。
メンバー間の考えや意見が食い違い、ケンカしたこともありました。しかし月日は流れロボットが完成するに従い、みんなとも仲良くなり、友は仲間に仲間は家族になりました。私はこれからもこの掛け替えのない家族と歩みを進めて行きたいです。
三輪好輝君(情報工学科3年)
 今回初めてのレスコン参加でしたが、非常に良い経験ができたと感じています。
今回初めてのレスコン参加でしたが、非常に良い経験ができたと感じています。
4月に編入学して以降、4ヶ月という短い間でしたが、プログラムという重要な部分の仕事を任され、重い責任に何度も潰れそうになりました。しかし、他のメンバーの期待にこたえられるよう、自分らしさを残しつつできる範囲で精一杯、自分の仕事を進めていきました。
結果は100%を超えるものとなりましたが、自分としてはやり残した仕事のほうが多く、来年度への課題がすでに山積みです。
チームとしてのレベルの底上げの意味も含めて、よりチームに貢献できるよう、今後の計画と実践を意義のあるものにしていこうと考えています。
芝 和亮君(電子機械工学科2年)
 僕は、今回初めて大舞台のレスキューロボットコンテストに出場しました。
僕は、今回初めて大舞台のレスキューロボットコンテストに出場しました。
役割はヘルパーで、ロボットがフィールド上でトラブルに陥り、コントロールルームでリスタートトボタンを押した時に、機体をフィールドから出すことです。あと、競技終了後フィールドにいるロボットをベースに搬送することが仕事でした。競技では、ロボットが順調に活動していたので、僕自身はこれといって活躍はしていません。
チームのメンバーが、ハードウェア、ソフトウェア、オペレータなどを頑張ってくれたおかげで予選、ファースト、ファイナルミッションなどで好成績を出せました。本選では、ファーストとファナルで3体のダミヤン救助、搬送完了。ダミヤンが持つ情報の認識ができたので合計ポイント1050点をとることができました。
チーム一丸となった結果、大きな賞を2ついただきました。仲間のみんなに「ありががとう!」と感謝の気持ちで一杯です。
小國翔平君(電子機械工学科2年)
 今年初めてのレスコン出場だったので、競技本選の雰囲気とかあまり分かってなかったです。正直、初日のファースト競技を自由工房の「救命ゴリラ!」が1、2位通過をするとは思ってませんでした。
今年初めてのレスコン出場だったので、競技本選の雰囲気とかあまり分かってなかったです。正直、初日のファースト競技を自由工房の「救命ゴリラ!」が1、2位通過をするとは思ってませんでした。
僕はヘリテレを主にやっていて、そこまで緊張はありませんでした。しかし、ロボットのオペレーターの方々は、あの緊迫した雰囲気の中で、いつもと同じように操縦していました。毎日の練習が、本番に発揮できてすごいと思いました。
「救命ゴリラ!」2チーム合わせて、4つも賞を貰えたのが本当に嬉しかったです。