電通大杯 ヒト型レスキューロボットコンテスト 2014
2014年11月2日(日)、大阪電気通信大学のテクノフェアの一環として、駅前キャンパスにおいてヒト型ロボットによる災害救助をテーマにしたロボットコンテスト「電通大杯 ヒト型レスキューロボットコンテスト 204」が開催されました。15体のエントリーがありました。自由工房からは@体が出場。本選に@が進出し、能㔟賢人君(電子機械工学科1年)が2位、技術賞を大野拓美君(情報学科2年)、河端 一紘君(電子機械工学科1年)が獲得と活躍しました。
競技準備、運営には自由工房のメンバーが協力。親子連れなど多く方に来場いただき、楽しいイベントになりました。




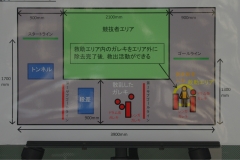
競技内容
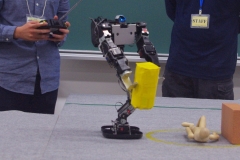
ヒト型ロボットが遠隔操縦で、「トンネルくぐり」「段差乗り越え」「ガレキ除去」のタスクをクリアし、要救助者をゴールまで搬送します。フィールドのサイズは約4m×2m。タスクをクリアするために、各自が工夫した道具の使用を許可されています。
目視で操縦する「目視部門」と、搭載カメラの映像のみで操縦する「搭載カメラ部門」があります。


メンバー感想
能㔟賢人君(電子機械工学科1年) /ロボット名:コマドリ-改

今回人型レスコンに参加し、2位という結果になりました。
参加するからには1位を目指しましたが、コマドリ-改で上位を目指すにはとても無理があったと思っています。
その理由は2つあります。1つ目にロボットのハンドの穴に要救助役人形の頭がうまく入らないことです。これはハンドの長さを調節し、頭がうまく入るようにしたいと思います。2つ目にモーターが古くなりすぎていることです。古いせいでモーターの原点がずれていたのでそこを直したいと思います。来年こそはちゃんと救助して1位をとりたいです。


大野拓美君:情報学科2年)/ロボット名:トランザー


惜しくも技術賞を受賞という点で終わってしまいましたが、そのかわりに改善すべき点が多く見つかりました。
大会に望むにあたって立てたコンセプトは、今あるロボットをなるべく変えずに道具を使って補う、というものでした。
そこで、Robovie-Xの改造機である「トランザー」を使うことにしました。
このコンセプトで発生した問題がいくつもありました。第一にどうしてもそのままでは使うことができませんでした。地面に腕をつけることができない、もしくはできても立ち上がれません。
これでは地面に横たわっている要救助者を救助するモーションを作ることがほぼ不可能です。結果的にヒト型レスコンにあわせたロボットの改造が必要になってしまいました。
次に重心の問題がありました。Robovie-Xは縦長の胴体でかつ腕も比較的高い場所に取り付けるようになっています。これでは重心は高くなり、要救助者を抱き上げたときの重心変化に対処しづらくなります。
実際に今大会でもっとも苦戦し、かつ挫折した点は救助モーションでした。要救助者を抱えた後のバランスがうまく取れませんでした。
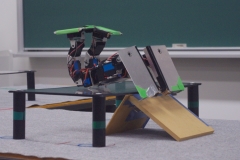
最後に道具も少し問題がありました。台車を使った台くぐりはともかくとして、段差を降りるための滑り台、そして磁石を用いた担架は非常に問題のある道具だと感じました。滑り台は一番役に立ちましたが、とにかく強引でロボットに与える衝撃も審査員に与える印象もどちらもよくありません。もっとも他のロボットも段差を高速で軟着地できているものはいませんでした。
磁石を用いた担架は実際に使うことはできませんでしたが、2つの問題を抱えていました。1つは磁石を用いていることです。一般的に電子機械を用いているものと磁石を近づけるのは好まれません。特に今回はロボットが磁石の上に転倒する可能性もあったのですからなおさらです。
もうひとつは担架を動かすことの難しさです。磁石を用いることによって比較的簡単に担架を「ひっぱる」ことができますが、ヒト型ロボットでは紐をひっぱるより押したほうがおそらく効率はいいでしょう。
一つ目の問題点から考えていきます。次回は新規のロボットを製作することでヒト型レスコンに適したロボットを作ろうと思います。
これで2つ目の問題も同時に解決できます。次のコンセプトは、低重心低身長ロボットでいこうと思います。低重心にすることで起き上がりなどが難しくなるでしょうが、かわりに転倒しにくくなりかつ救助モーションで要救助者を抱えたときのバランス変化も抑えられると考えています。
道具関連の問題は、今はあまり考えていません。しかし、滑り台はやめてリフトやエレベータのようなものがあればいいと思っています。担架はやめて手押し車のようなものでやればより自然にかつ効率的なのではと考えています。
来年は卒研ですがでられるようにがんばりたいと思います。

河端 一紘君(電子機械工学科1年)/ロボット名:Phoenix


ヒト型レスコンは、新規製作のロボットを製作して挑戦したかったのですが、時間がなくて間に合いませんでした。以前から使用している「Phoenix」をレスコン用に改修して参加しました。
腕の構造を変え、ダミヤン人形を持ち上げられるように変更しました。モーションもトンネルくぐりように台車に乗り移動するモーションと、段差乗り越えをするためのモーションを新たに作りました。
大会当日では、機体のガタが出て胴体内部のサーボが壊れるというアクシデントが起こり、修理することになりました。修理は早く終わり、大会には出られるようになりました。しかし、段差の高さが練習時とは違う関係で、想定はしていたのですが開始時間までひたすらモーション調整をすることになり、ぎりぎりの挑戦になりました。
ファーストミッションがはじまり、トンネルくぐりは上手く進めました。次の段差乗り越えですが、3度失敗して4度目で何とか登ることができました。
しかし、この段差乗り越えで時間を取られてしまい、人形の周りの瓦礫を撤去したところでタイムアップになりました。
自分でも予想していなかったのですが、ファイナルミッションに参加できる6体に選ばれました。
ファイナルミッションでは、トンネルくぐりで少し躓きましたが、段差乗り越えがスムースにクリアでき、ロスを埋められました。
ところが段差乗り越えが終わった後、左足のサーボモーターが動かなくなり、そこでリタイアとなりました。
サーボモーターが壊れた原因は分かりませんでしたが、ギアでも制御基盤でもなくモーターのみが損傷していました。
結果は残念でしたが、技術賞をいただくことができました。人型レスキューコンテストの参加は初めてだったので、次回はもっとアイデアを凝らしたロボットで参加したいと思います。


川中裕士君(電子機械工学科1年)/ロボット名:大電通ウグイス-改

大会出場の目標は、練習通りに確実に6分以内に救助することです。しかし、救助はできず、ファーストミッションのポイントは9位でした。。
敗因は段差乗り越え時の足の不具合による時間切れでした。
私は、大電通ウグイス-改で出場する予定で、大会直前まで、大電通ウグイス-改のモーションの調整を行っていました。
初めのタスクである「トンネルくぐり」は台車の車台に乗る事はできましたが、動かす動作により台車からずり落ちて机台をくぐる事はできませんでした。
ゴムテープを出来るだけアームや背中につけて、摩擦を増やす事で車台からずり落ちる事もなくなり成功しました。
しかし、あと「救助」と「机台乗り越え」の動きは完全にはできていなかったため、結局本番は1号機で挑みました。
できれば大電通ウグイス-改で試合に出たかったので試合までの時間にどうにかできないかと2号機を調整しましたが間に合いませんでした。
1号機は一番よく練習しており、どのタスクも成功していましたが、本番に不具合が生じました。初めの車台に乗って机台の下をくぐる事はなんとか出来たものの、横歩きがいつもとは違って様子がおかしかった。
その時点では何が原因かはわかりませんでした。
バッテリーも本体とコントローラー、両方とも(30%以下で充電されていたものを使うと動きが鈍くなる事がわかっていたので)70%以上で充電されていたものを使いました。
コードも外れている所はありません。なのに、本番前にはちゃんと出来ていたことが本番では出来なくなっていました。
右足が明らかにおかしく、台を乗り越える所でうまく乗り越えに時間がかかりました。ようやく机台を乗り越えられたものの、そこで時間切れとなってしまい、要救助者の人形を救助出来ませんでした。
後々2回生の近藤さんと調べてみると右足のコードはちゃんとついてはいましたが、電気が通っているかどうかが判る赤いランプが光っておりませんでした。つまり、電気が通っていなかった事にそこで気付きました。
その足の場所は2本のコードが付いていましたが、どちらとも電気が通らない不具合のあるコードの様でした。
反省としては突然の不具合に対応できる経験や力を身につけるべきだと思いました。
次回の大会に出場できるならば、確実にタスクをクリア出来るモーションをつくって、不本意な結果を対処できる力をつけて、余裕のある救助を可能にしたいと思います。


藤原庸平君(情報学科2年)

今回僕は、初めてレスキューコンテストの大会に参加しました。サポート役とは言え、出場予定ロボットの全モーションを僕一人で完成させなければならなかった為、とても大変でした。
大会前日には、サーボが弱ってきた為交換作業を行い、徹夜で全モーションの再調整を行っていました。加えて、不具合があるモーションも調整し直し、大会本番へと備えました。
結果から言うとバランス調整に不備が有り、台潜り・台登りで最速クラスのタイムを出していたにも拘らず、最後の救助活動が出来ないまま競技を終えてしまいました。
救助モーションが完璧であったらと思うと、悔しい気分です。
スナップ