


-
リンク
「知能ロボコン」カテゴリーアーカイブ
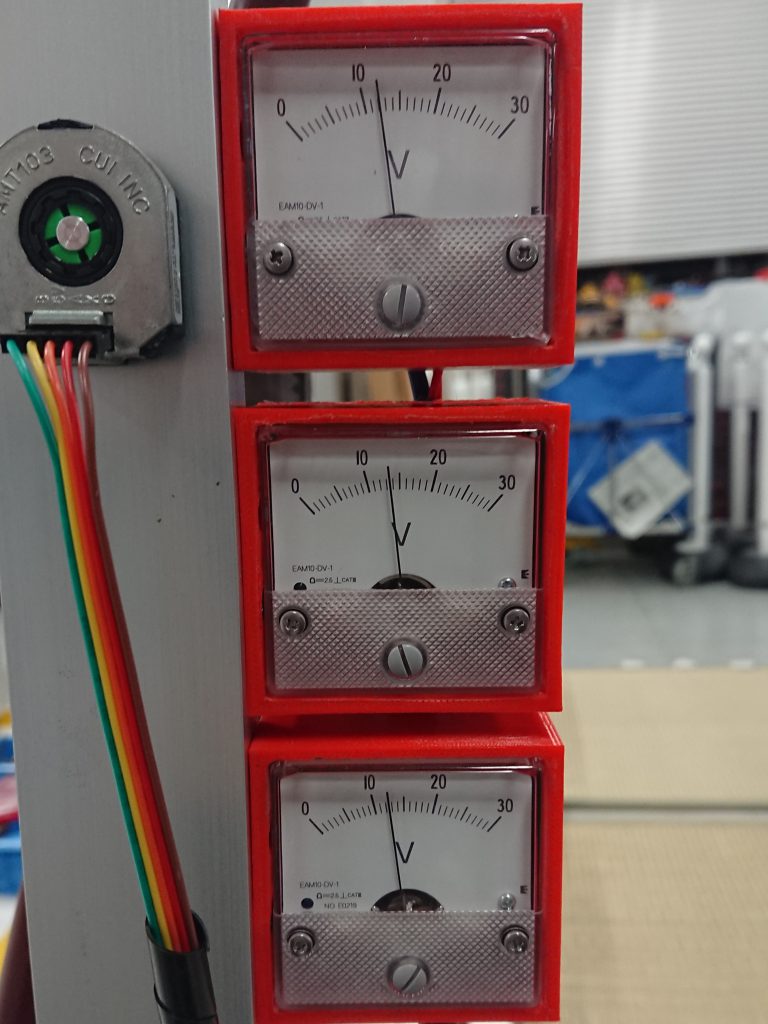
電圧計を取り付けました。
電圧計を取り付けることでロボットのバッテリー残量を容易に確認できるようにしました。取り付けた理由は、ロボットが不振な挙動をした際の状況確認をスムーズに行い、速やかな原因究明を実現するためです。
カテゴリー: 知能ロボコン
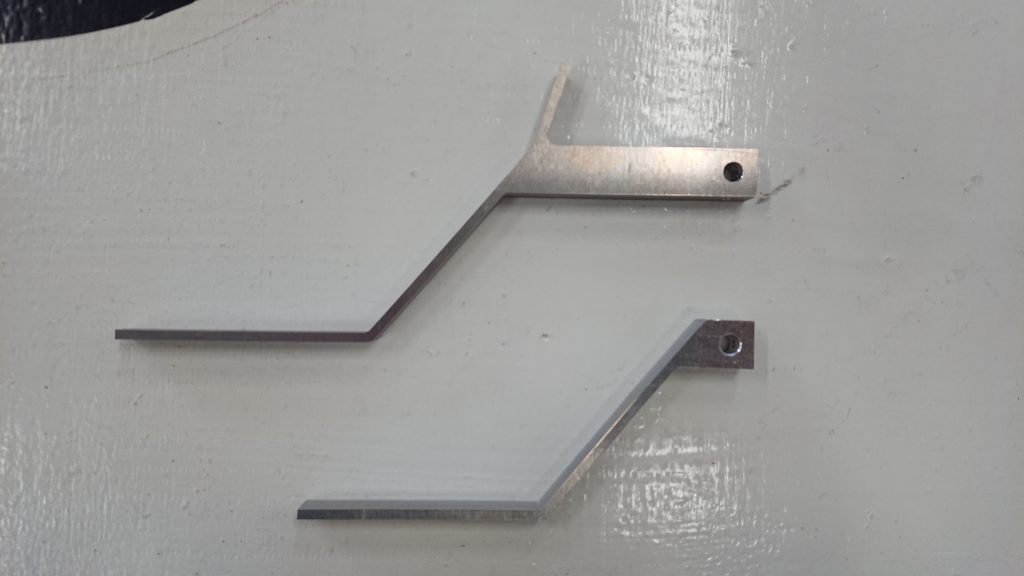
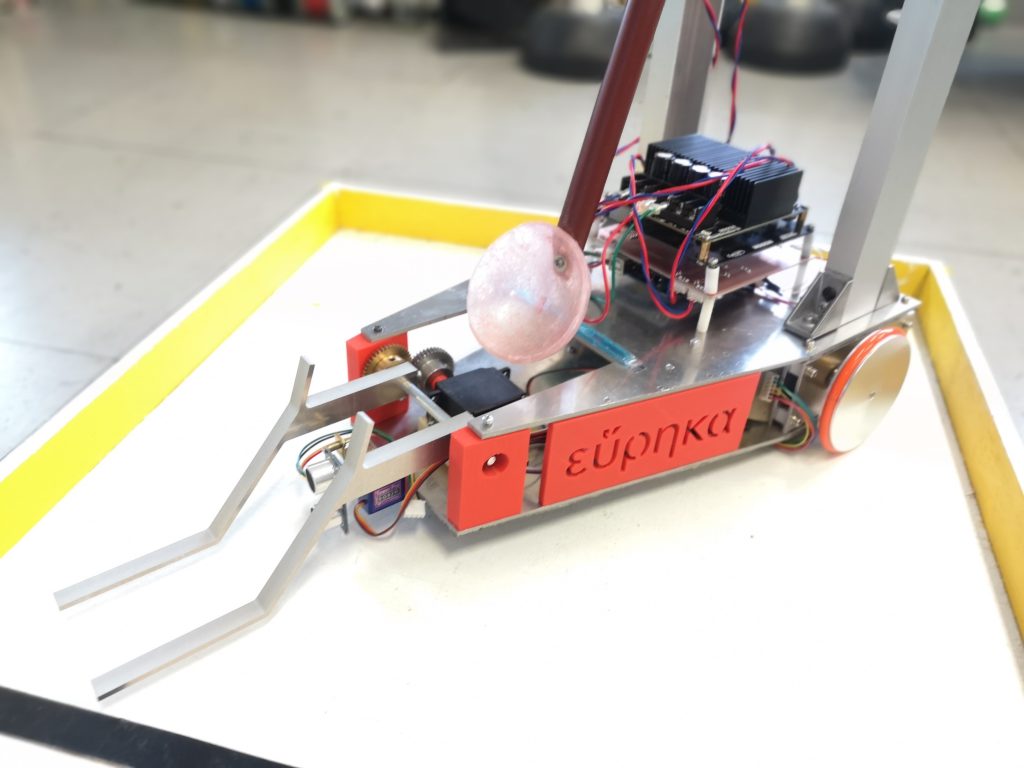
新アームが完成しました
新アームが完成しました。画像の上のアームが新しい方で、下が古い方になります。見ての通り少し長くなり、上に出っ張りが付きました。この出っ張りのおかげで、投球機構のカップにスムーズに入れることができます。
カテゴリー: 知能ロボコン
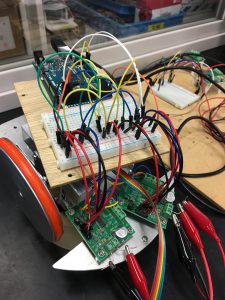
配線を綺麗にしました
edf 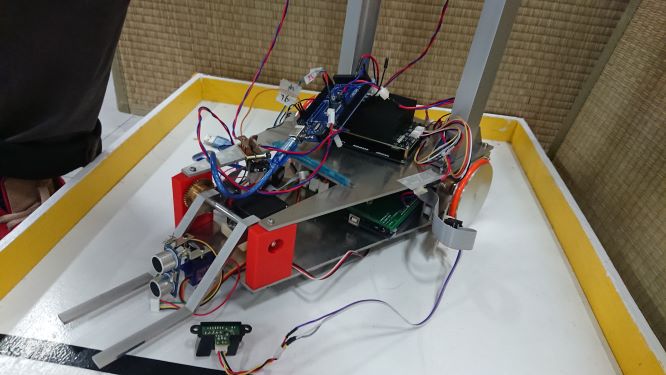
左側が配線をまとめた後、右側がまとめる前です。
センサーやモーター等の配線を基盤にまとめ、モータードライバーの下に設置したことで、配線がスッキリしました。
カテゴリー: 知能ロボコン
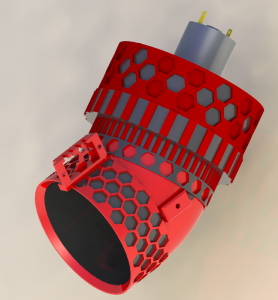
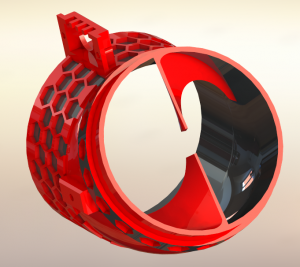
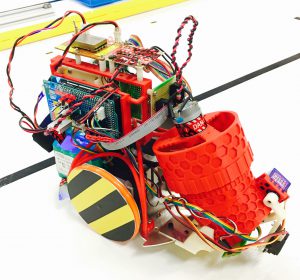
投球機構ができました
自分達のロボットの最大の特徴となる投球機構が完成しました。
実際に動かしてみたところ上手く飛んだので、大会では実際にゴールに入れられるように制度を上げていきます。
カテゴリー: 知能ロボコン
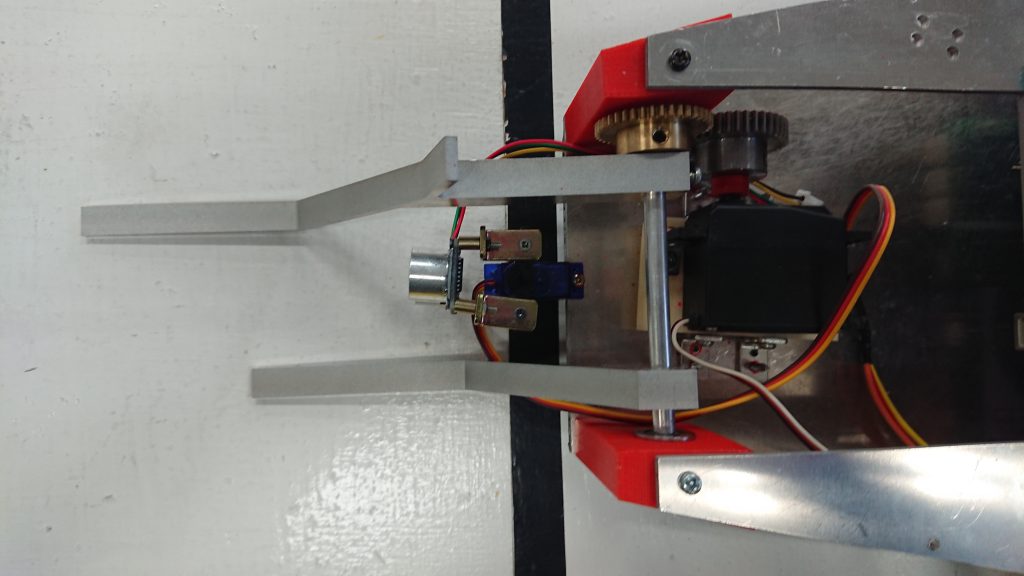
アーム完成しました。
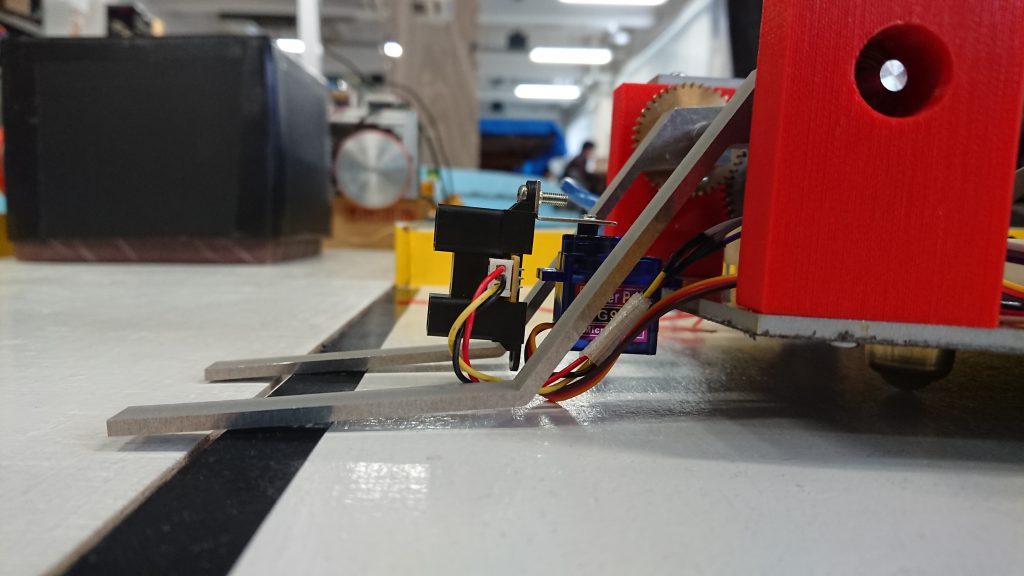
写真に載っているフォークリフトのツメの様なものは、ボールを掬い取るためのアームです。しかし、実際に機体に取り付けてみると、アームがボールを取った際に、センサーが干渉してしまう不具合を発見しました。現在新アームを設計しています。
カテゴリー: 知能ロボコン
ロボット(neo : マキシマ)完成
Arduinoに12Vのバッテリーを繋げてしまい、過電圧で回路基板を壊してしまいました。センサー類は無事でしたが、モータードライバとArduinoが動かなくなりました。故障してしまった部品を取り替え、回路も作り直しました。今は、ボールを全て取れるようになりました。これから調整に入ろうとおもいます。また今回を反省し、今後は気をつけます。(井堀幸祐君:電子機械工学科2年)
カテゴリー: 知能ロボコン
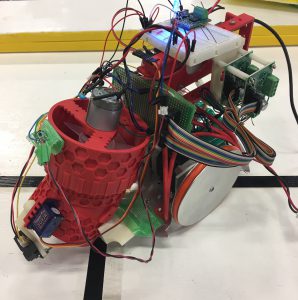
機体全体の組み立て
今週はロボットの機体全体を組み上げました。基盤ケースとその柱の部分は設計したものを3Dプリンターで作っていただきましたが、設計ミスで吸引機と車体盤間の接続がうまくいかず、また製作しようと思います。実際に動かす段階に入りたかったので、モータードライバの並列回路を基板作りました。ですが実際に走らせてみると、車輪半径が大きいため少しトルクが足りないようでした。来週はそれらを改善します。(井堀幸祐君:電子機械工学科2年)
カテゴリー: 知能ロボコン
足回り
僕たちのロボットの移動にステッピングモーターを使おうと考えています。そのステッピングモーターで動かすためのモータードライバをL6470にし、デイジーチェーン接続させました。先輩の協力もあり、回転方向と連続回転ができるようになりました。これからの目標は、ライントレースができるようにすることです。(井堀幸祐君:電子機械工学科1年)
カテゴリー: 知能ロボコン