家ガレキの壁を確実にはがせるように操縦を特訓しています。(上殿泰生君:機械工学科1年)
底板の剛性が不足してたわんでいたので、作り直しています。肉抜きはフライス、穴あけはケガいてボール盤でやりました。(大林尭史君:電気電子工学科2年)
カメラからの映像で、倒柱ガレキを起こす練習中。スムースに起こせる確率は、まだ50%といったところです。(浦野蒼士君:電子機械工学科2年)
工作機械を使ったら、すぐに片付けましょう。整理整頓は、安全管理の基本です。写真のように放置したまま、「帰る時に片付ければいいや・・・」では、ダメです。
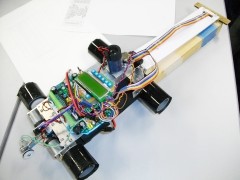
2号機アームのスライドバーにリミッタースイッチを取り付けています。動作確認をして、他のロボットにも搭載を検討します。(中村祐一君:電子機械工学科1年)
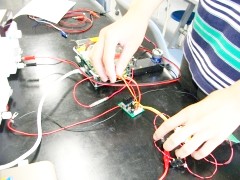
平窪さんに教わりながら、先週に引き続き基板作成しています。ハンダ付けは全て自分でやりました。回路図の解説もしていただいて、基板製作を基礎から勉強中です。(山中拓也君:電子機械工学科2年)
スタートバーが開閉したことを感知するセンサーのプログラムをチェックしました。現在、テスト走行は7〜8割の完走率で、連続3周走ると最後に落ちるかもしれないという感じです。(和田貴大君:情報工学科3年)
1号機のアームを作り直しています。ダミヤン救助に適したサイズを検討中。(浦中雄太君:電子機械工学科2年)
ダミヤン救助のベルトコンベアを張り替え、動作確認をしました。
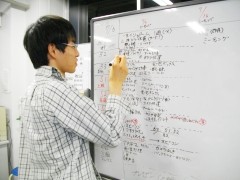
競技会予選の中で得た課題をどうクリアするか、話し合いました。修正すべき点をホワイトボードに全て書きだし、ひとつずつ改善していきます。