


-
リンク
「ロボット相撲」カテゴリーアーカイブ
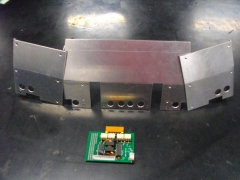
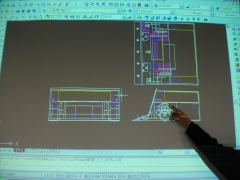
図面
これは、2段階になっている2枚目の前板です。2月中に設計図をアップする予定です。5月の上旬にマシンを完成させたいと思っています。(魚井成晃君:機械工学科2年)

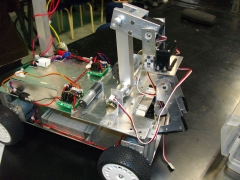
新型コンセプト
安定走行と速度アップを目指して、これまで使用していたデジタルサーボをやめて、アナログサーボとアナログセンサで、機体設計をします。後輪2駆動だったのを4輪駆動に変更。ある程度の車幅がないと、カーブで振られてしまうので、設計を検討しています。(三原和也君:通信工学科1年)


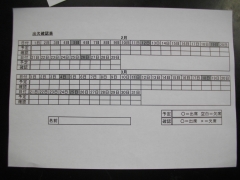
出席確認表
アイデアシートを無事に提出しました。本部から受領の案内が届きました。これから本格的作業が始まります。去年同様、出席確認表を作り工程管理に役立てていきます。(上殿泰生君:機械工学科2年)

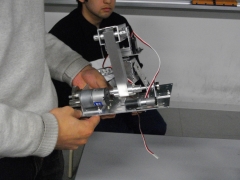
ギアの加工
池田紘彰君(電子機械工学科1年)が、全日本大会に出場した際、ピニオンギアのネジ穴が壊れてしまいました。この部分を作り直しました。(阿部史和君:メディアコンピュータシステム学科1年)


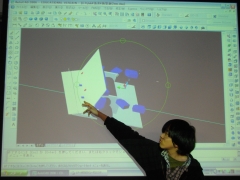
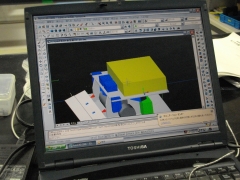
設計中
上部に搭載している黄色部分が基板です。基板をもう少し小さくしたいと思っています。今後、強度を考えて、耐久性を考えた設計を加えていきます(魚井成晃君:機械工学科2年)
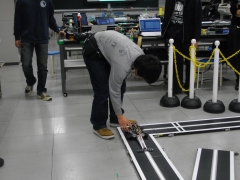
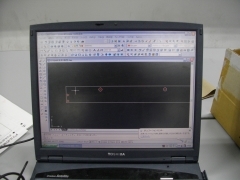
調整用コース
カーブとS字走行の検証のために、17mの長いコースを作りました。電通大杯に向けて、マシンの速度を上げて調整をしています。(安慶名将君:電子機械工学科3年)

