



-
リンク
「ロボット相撲」カテゴリーアーカイブ
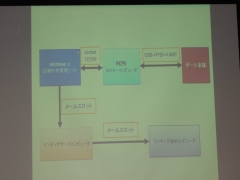
MCRTimer2
スタートゲートとタイマーコンピュータを接続して、自動的にタイムを記録し、順位表示まで行うシステムを開発しました。(中村祐一君:電子機械工学科3年)

調整中
ステアリングの機構に採用しているウォームギアの動きが期待どおりにいっていません。動力のロスが大きくて、パワー不足でステアリングがきれません。モーターの出力が足りないので、パワーをあげたら解決するかもしれません。どうしても動かなかったときの対策も考えながら、調整していきます。(中森智史君:電子機械工学科2年)

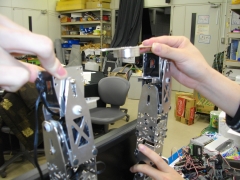
トルク計算しました
トルクの計算をしたら、設計の変更が入りました。ショベルカーのような形のアームが重過ぎるので、曲げる部分の関節を2つにして力を分散させました。(廣田晋也君:電子機械工学科1年)

予定変更
水曜日にプロジェクトミーティングを行いました。製作していた1号機のパーツがほとんど使えなくなりました。また、4機分作る予定だったのが、時間の関係上で3機分だけになりました。(鮫島智樹君:電子機械工学科2年)
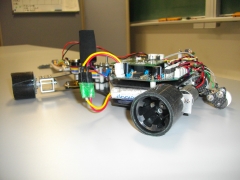
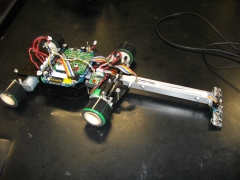
二輪制御
10月のテクノフェアまでは4輪マシンでしたが、今回は2輪にしました。モーターをマクソンに変えたので、2輪でもパワーが出るし加速度は上がります。マクソンで4輪だと重くなってしまうので、2輪にしています。今の重量812gなので800g切りたいと思っています。(三原和也君:通信工学科2年)