






-
リンク
「レスコン」カテゴリーアーカイブ
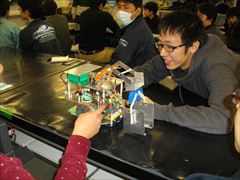
センサー配置
3つのセンサーを使ってラインを追うようにしてました。センサー間を3cmにしていたので、ラインの幅が2cmなので、空白期間があって動きが遅かったです。センサーを5つに増やしてきめ細かく対応できるようにしました。(向井 誠嗣朗君:電子機械工学科1年)

カテゴリー: レスコン
全日本ロボットアメリカンフットボール大会
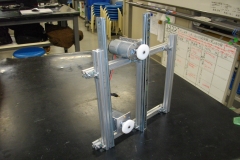
ロボット相撲から派生した全日本ロボットアメリカンフットボール大会が22日にあります。去年のロボットの足回りのパーツを作り直しました。(西原琢也君:電子機械工学科3年)


カテゴリー: レスコン