



-
リンク
「レスコン」カテゴリーアーカイブ
2号機子機:ギアの完成
右側ギアを仮組みして設計の確認しました。微妙なズレがありましたが、許容範囲ということでOKになりました。左側も組み上げて完成しました。(鮫島智樹君:電子機械工学科2年)

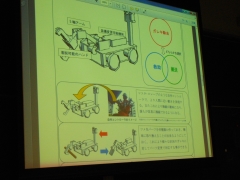
2号機:親機のフラップ
フラップを動かすのにリンク機構を使っています。そのリンクがフラップを下ろしすぎたとき、駆動エラーで戻らなくなってしまいます。その対策として、1)電気的にリミッターを搭載、2)機械的にアクチュエータの軸にストッパーをつけて下がりすぎないようにする。どちらにするか検討中です。(鹿島健吾君:電子機械工学科3年)
定例ミーティング
レスコンプロジェクトにも、新メンバーが入りました。レスコンプロジェクトの発表は、プロジェクターと実機を示しながらするので、新メンバーにもわかりやすく好評です。

薦田室長よりメッセージ
学生を支援するための「ゲット・カフェ」が2回終わりました。お疲れ様でした。
学生は動いているものを見ると、驚きます。自由工房のメンバーの授業にあわせて都合のいいときにやるわけですが、事前にスケジュールを組んでください。
6月いっぱいくらいまでのスケジュールを立てて、いつどのプロジェクトがロボットを動かせるのか見通しを立ててください。
シェリダンカレッジから見学
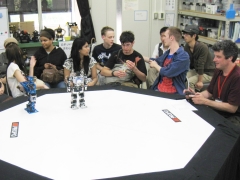
学術交流協定校であるカナダ・シェリダンカレッジから学生9名、大学関係者2名が四條畷キャンパスに来学、自由工房も見学されました。
自由工房の概要を説明し、河口真丈君(メディアコンピュータシステム学科3年)がヒト型ロボットプロジェクトの活動を説明しました。3体のロボットによるバトル、荒柴祥太君(情報工学科4年)ヒト型レスキューロボットの実演をしました。
見学時間は30分ほどでしたが、見学者からはロボットの動きに笑いと拍手がわいていました。最後に行った操作体験は、一番楽しんでもらえたと思います。



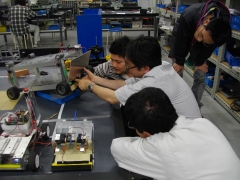
クランクの調整
機構的には、クランクを曲がるようにセンサーアームが切れるのに、走行させると曲がりきれずに落ちてしまいます。ソフトの問題だと思うので、調整しています。(大西祐喜君:通信工学科2年)


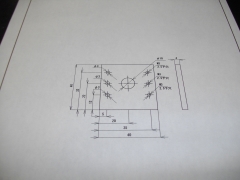
技術講習会の課題
第1回目の課題は、バンドソーで部品を切り出し、ボール盤で穴あけとヤスリで仕上作業です。部品のサイズは誤差±0.3mmまでは許容範囲としました。一応、穴の精度には問題がないと思います。

クランクでコースアウト
クランクでコースアウトします。クランクで外側のラインを中央ラインと間違えてしまっているようです。クランクの検出はしているので、プログラムをチェックして修正します。(三原和也君:通信工学科2年)


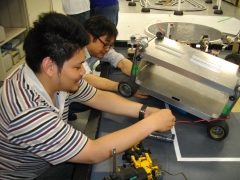
本体が完成
本体が完成しました。ネジ穴がズレてしまったので、応急処置でマジックテープ止めをしています。調整してバグだしをしてから、カバーを作り直します。(阿部史和君:メディアコンピュータシステム学科2年)
