

-
リンク
「ロボット相撲」カテゴリーアーカイブ
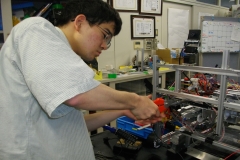
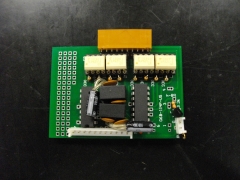
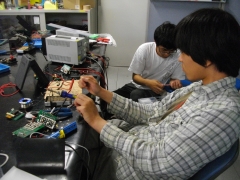
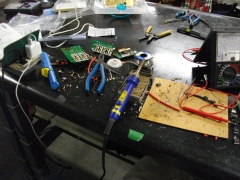
FET基板作成中
ロボットのプログラムミスでFET基板を壊してしまいました。壊れた分を修正し、念のため予備の基板を作成中です。(阿部史和君:メディアコンピュータシステム学科2年)
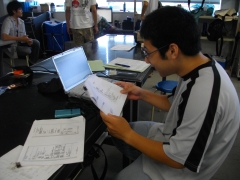
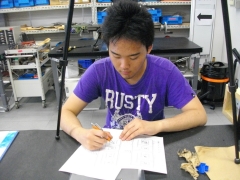
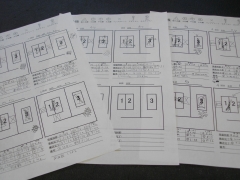
オペレーションログ
練習時には、必ずログを取っていました。どのようにガレキを配置し、どのロボットがダミヤンを救助したのか、記録を残すことで、経験がその後のミッションに活かされるからです。漠然と練習をするだけでなく、練習の中でどれだけ課題を発見できるかが、ロボットの性能を向上させるために、必要です。
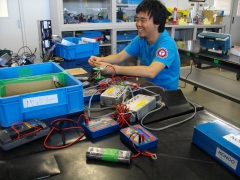
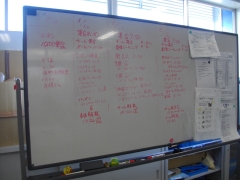
バッテリー&スケジュール管理
全体練習を終えたので、バッテリーを充電中。バッテリー数に余裕があまりないため、効率よく管理をしています。ロボットの搬出からファイナルミッションまでのスケジュールもホワイトボードに記し、メンバー全員が確認できるようにしています。プロジェクトメンバー数が多いので、情報伝達は重要です。(鮫島智樹君:電子機械工学科2年)
CACS&CIMI
全体練習で、CACS&CIMIがしっかりと稼動しました。4台のロボットからの映像と音声をまとめて1台のPCに表示しています。ダミヤンの個別情報収集を一元化できるのはもちろん、各ロボットの活動状況は一瞥できるため、キャプテンがオペレータに適切な指示を出せるようになりました。


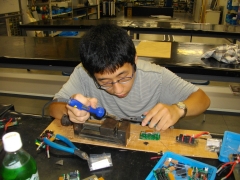
モータドライバのチェック
既存のモータドライバのチェックをしたところ、動いているものが1つしかありませんでした。修理が必要なものを直して、使えるようにします。(魚井成晃君:機械工学科3年)
ギア補修
昨日、土俵上で初めてロボットを動かしたら、ギアのイモネジが外れてしまいました。今までイモネジ1本で固定していたのを、2本にして強度を持たせます。(西原琢也君:電子機械工学科1年)


LANシステム
各ロボットが得た映像は、それぞれのオペレータの元に送られます。それらの映像を、TPIP2 RRCに組み込んだオリジナルライブラリで、メインPC1台に送ります。今は、1号機から得たデータを、転送テストしています。これから複数台の連携テストを行います。(中村祐一君:電子機械工学科3年)


4号機:ベッド周りの補修
リンク式ベッドのフレームがあがらなくなってしまったので、補修しました。原因は、ウォームホイールに通っているアルミ製の軸が、イモねじで削れていたためです。軸が空回りしてしまい、保持力が落ちていました。。(目黒隼人君:機械工学科3年)