







-
リンク
「ロボット相撲」カテゴリーアーカイブ
第2回ロボット相撲練習会
第2回ロボット相撲練習会を実施しました。今回は外部から2名が参加してくださいました。お2人が上位に入っています。自由工房メンバーも気を引き締めて頑張りたいと改めて思いました。詳細レポートは、コチラ
です。


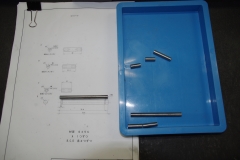
ギアの軸
ギアをつけるための軸を作りました。さび取りをして、長さを調整しました。これで足回りが完成したので、来週からボディの板金にはいります。(池田紘彰君:電子機械工学科1年)

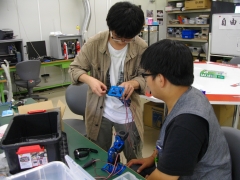
歩行の調整
サンプル歩行ができるようにロボットの初期調整をしています。サーボがヘタっているので、調整が難しいです。(杉本大樹君:メディアコンピュータシステム学科1年)


組立て
RBの組立てをしています。何度もばらしたり組み立てたりしているので、ネジ穴がゆるくなってしまっていて締まりません。古いパーツから使える部分をとってきて、作業しています。(中藤陽介君:メディアコンピュータシステム学科1年)

B2号機:クローラーの強度
クローラーのテンションを張りすぎていたため、ピンが曲がってしまい樹脂製の留め具に負担がかかってしまいクローラーが切れてしまいました。強度に問題があることがわかったので、改善しようと思います。(浦中雄大君:電子機械工学科3年)

