


-
リンク
「ロボット相撲」カテゴリーアーカイブ
3号機 子機
本体部分が組み上がりました。全てのモーターがコントローラーから動くのを確認できています。重量オーバーだから、ダイエットが必要・・・(中島誠君:メディアコンピュータシステム学科3年)

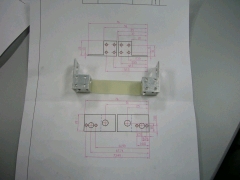
武器の加工
先週作っていた板モノが終わって、今週の火曜から武器作りにはいって、粗加工までできました。まだ材料が揃っていないので、入手し次第どんどん加工していきます。畠中一輝君(電子機械工学科1年)
精密バイスの活用
モータのシャフトにギアを差し込む時に、精密バイスを使ってます。ちゃんと固定して、まっすぐに力を加えないと、シャフトがゆがんでしまうので、慎重に作業します。。(古川陽介君:電子機械工学科3年)


歩行モーションの調整
腰が入ったパンチを打てるように、腰ヨー軸を追加しました。機体のバランスが変わり歩行が不安定になったので、歩行モーションの調整中。(石塚 拓也君:電子機械工学科1年)

マイコン基板 ver.1
マイコン基板の試作品ができました。サイズは前と同じですが、中央で2つに分割できるようにコネクタで繋いでいます。FETが壊れた時に基板の差し替えができるようユニット化しました。(平窪一貴君:電子工学科2年)

FET回路の改良
去年使っていたFET回路を、コンパクトかつメンテナンス性をアップするために改良しています。ちょっと不具合があるので、修正中です。(平窪一貴君:電子工学科2年)

1号機が動きました
1号機は、ラックギアを使ってアームを前後に動かす方式を採用。11月から製作にかかって、ようやく動かすところまできました。3つ搭載したカメラから取得した映像で、動作チェック中です。(齋藤佑一君:電子工学科2年)

