

-
リンク
「ロボット相撲」カテゴリーアーカイブ
白線認識
センサを搭載し、配線が終了してプログラムができるようになりました。白線センサが反応しているときに音が鳴るようにしました。土俵の傷を白線とご認識しないように、認識時間を設けています。(西原琢也君:電子機械工学科1年)

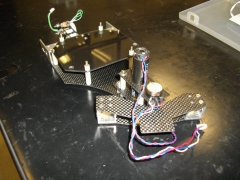
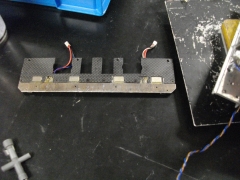
機体完成
自分で設計した基板に、センサをつけてロボットを完成させました。FET回路を2つ用意し、モーターが性転・逆転、フリーができるような回路にしました。センサは6個搭載しています。あとから、4個増設できるようになっています。これからプログラムを移植し、来週か再来週には動く予定です。(西原琢也君:電子機械工学科1年)

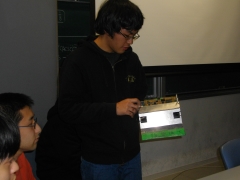
FET基板
FET基板を作り直しました。試合中、ものすごいパワーでロボットがぶつかりあうので、FETが壊れます。どこが壊れたのかを確認して修理します。あと4つ修理して、予備用に新しく作ります。(阿部史和君:メディアコンピュータシステム学科2年)


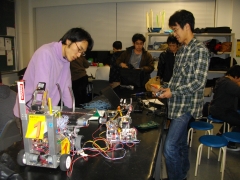
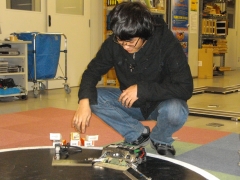
機体整備
日曜日に神奈川工科大学で開催されたロボット相撲の練習会に参加してきました。機体のダメージが大きいので、整備しています。ブレード取り付けるフレームが歪んでいました。弱いところをチェックし、来年に向けて設計を検討しなおします。(西原琢也君:電子機械工学科1年)


ソートプログラム
半角英数字をソートするプログラムを作成しました。バブルソートを使って、処理しています。あと2つの課題が難しいので頑張っています。(宮本普太郎君:工学部機械工学科1年)