



-
リンク
月別アーカイブ: 2014年6月
4号機:部品の調整
上下機構のラックギアが通る穴が小さくて、ひっかかってしまいました。やすりで穴を削って広くしました。使用するモーターを探したり、タイヤを作りました。(高木裕一郎君:電子機械工学科2年)

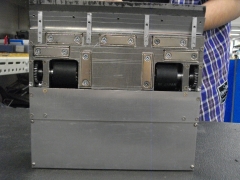
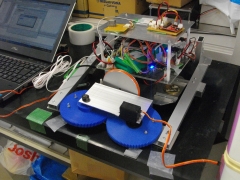
3号機:タイヤの工夫
衝撃吸収できるようにタイヤを工夫しました。ロボットの高さが58.25mmです。ゲートの高さが60mmなのでかなりギリギリです。上部パーツに不要部分があるので、形状を整えて対策します。(近藤由規君:電子機械工学科3年)
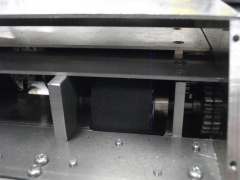
タイヤを作りました
タイヤが土俵に接地しなかったので、タイヤの径を大きくしました。そうしたら、モーターと干渉したので、もとに戻しました。かわりにギアボックスを1mm下げて対応します。軸を両持ちにして強度を持たせました。来週、基板を取り付けて性能をチェックします。(西原琢也君:電子機械工学科3年)
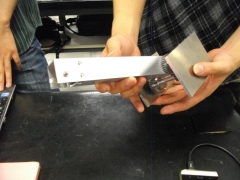
1号機:1年生に部品を作ってもらいました。
須下 貴博君 (電子機械工学科1年)に基板を隠すためのカバーを作ってもらいました。能㔟賢人君 (工学部電子機械工学科一年)にアームの先端を加工してもらいました。(清家悠太郎君:電子機械工学科3年)


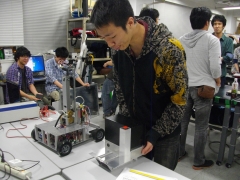
動作確認
動作を確認し、アームをつけた状態で走れるようにしました。アームを使って、ボールを取り込む動作を作りこんでいます。今、成功率が50%ですが、これをアップしていきたいです。(宮本晋太朗君:機械工学科3年)
サーボの動作確認
サーボが動くようになりました。まだ思ったように動いていないので、調整が必要です。プログラム通りに動かない理由を先輩に教えてもらいました。アームを取り付けると重心が変わるので、動作確認をします。(廣田晋也君:電子機械工学科3年)