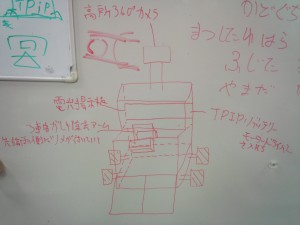
今は万能型のロボットを考えています。このロボットのイメージ図は僕が考えました。
特徴はいくつかあります。1)高い所から360°周囲を見渡せるカメラ 2)縦横無尽に移動出来るメカナムホイール 3)床にも家ガレキにも対応できる3軸ガレキアーム。
このアームの先端には2つのツメが付いていてそれにより両方のガレキに対応出来る構想です。
これから、みんなで話し合ってどんなロボットを作っていくのか楽しみです。(千葉 到君:電子機械工学科1年)

今は万能型のロボットを考えています。このロボットのイメージ図は僕が考えました。
特徴はいくつかあります。1)高い所から360°周囲を見渡せるカメラ 2)縦横無尽に移動出来るメカナムホイール 3)床にも家ガレキにも対応できる3軸ガレキアーム。
このアームの先端には2つのツメが付いていてそれにより両方のガレキに対応出来る構想です。
これから、みんなで話し合ってどんなロボットを作っていくのか楽しみです。(千葉 到君:電子機械工学科1年)
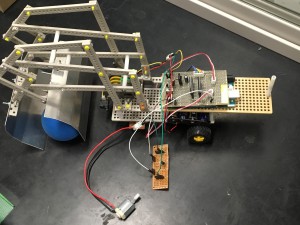
ここ2週間でリンクを使うアームを取り付けました。このアームは前に重心がありアームが重いため後ろに重りを乗せる必要がある事が分かりました。また、モーターが一個でトルクも足りる事も分かりました。(前田直樹君:電子機械工学科1年)
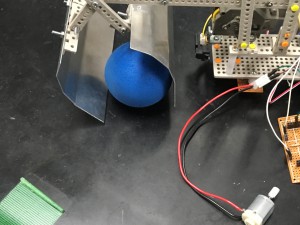
実際にライントレースさせることで様々な課題が見えてしました。まず距離センサーの位置が不安定なため、ボールを認識できなかったこと。プログラムをtimeで動作を変化させているため、ハードの出力に支障がでれば全体的に不安定な動きになってしまうことです。…
これからの課題につきましては、まず、ハードの完成です。ボールを持ち上げる装置も製作しようと考えています。(井堀幸祐君:電子機械工学科1年)
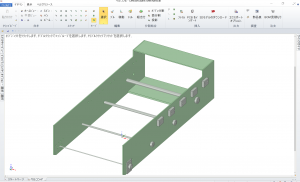
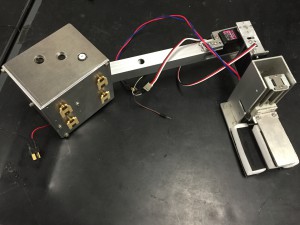
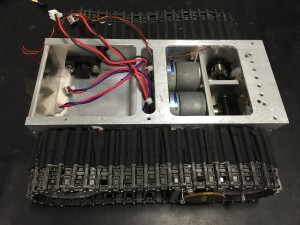
11/6に開催されるテクノフェアに向けて、瓦礫除去ロボットを作成をしています。写真のアームとキャタピラ駆動を組み合わせてロボットを作るので、必要な素材の図面を作るためjwcadの勉強を始めました。目標は来週までにロボットのための部品を図面、実物共に作ることです。(門口祐也君:資産運用学科1年)
メカナムホイールの足まわりの上にtpipとバッテリーを載せる部分の組み立てをしました。そして、プログラムの開発を始めました。ゲームコントローラーの対応するボタンが押されると縦横真横に移動するプログラムを考えました。しかし、ボタンが何も押されていないのに常に前進の出力が表示されるという現象が発生しました。先輩に聞いたりして上手く動くようにしたいです。(千葉 到君:電子機械工学科1年)

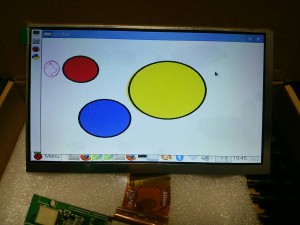
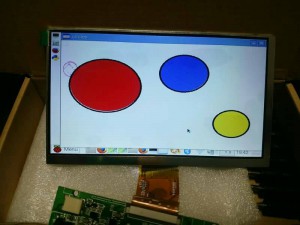
ボール検出のテストをしました。画像のように、競技用のボールを模した赤、青、黄色の円がちゃんと検出できています。黒い丸で囲ってある部分です。次は、今回使った画像をディスプレイか何かに表示させ、usbカメラなどで撮影しながら円を検出できるようにしたいです。(漆原宏丞君:電子機械工学科1年)
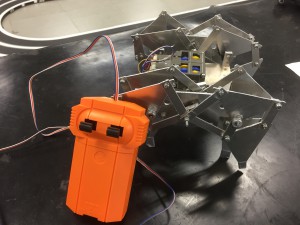
某社の力も借り、3週間かけてヤンセンビーストを完成しました。動力部は有線でリモコン制御です。足にスポンジを巻いたらグリップが効いて、滑らないで進んでくれました!有線だと可動範囲が決まってくるので、無線にして可動範囲を広めたいです。(黒木稔真君:電子機械工学科1年)
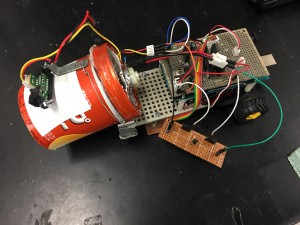
自作吸引機をArduinoで制御するため、トランジスタを使った回路を製作しました。動作確認ができたので、プログラムを書き込んでいきます。(井堀幸祐君:電子機械工学科1年)

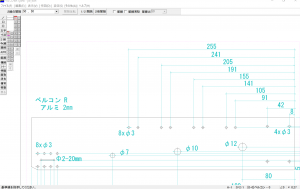
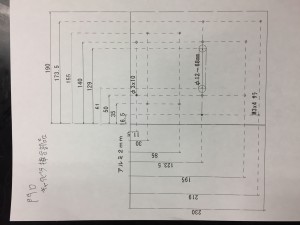
9月の中旬ごろから今年度の大会に出場したロボットのベルコンを参考にして、一から設計をしていました。
ベルトを回転させる方法や、前後機構をどうするか考えながら、まずはデザインスパークで設計し、jwcadで2Dの設計図を作りました。デザインスパークやjwcadの使い方を覚えながらの作業だったので予想以上に時間がかかりましたが、先輩方に相談をしながら作業をしました。
設計図はできたので来週からは加工を始めていこうと思います。(山田秦也君:電子機械工学科1年)