



-
リンク
月別アーカイブ: 2017年4月
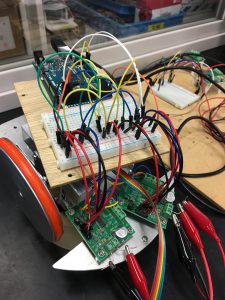
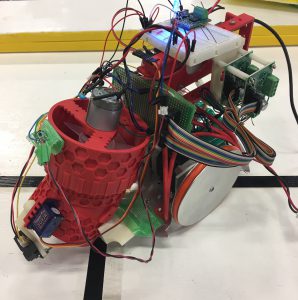
機体全体の組み立て
今週はロボットの機体全体を組み上げました。基盤ケースとその柱の部分は設計したものを3Dプリンターで作っていただきましたが、設計ミスで吸引機と車体盤間の接続がうまくいかず、また製作しようと思います。実際に動かす段階に入りたかったので、モータードライバの並列回路を基板作りました。ですが実際に走らせてみると、車輪半径が大きいため少しトルクが足りないようでした。来週はそれらを改善します。(井堀幸祐君:電子機械工学科2年)
カテゴリー: 知能ロボコン
フライス盤加工
今週も加工をしていました。まず、フライス盤加工で穴が貫通しなかった部品のボール盤穴開け加工をしました。次に、1・2号機のベルコンの側面板の電動ノコギリ加工をしてヤスリ掛けをしました。(千葉 到君:電子機械工学科2年)

カテゴリー: レスコン
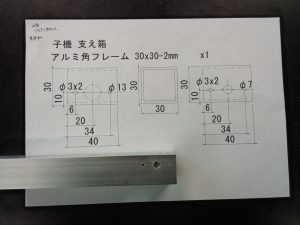
子機の支え軸
子機の支え軸を1から作り直すことになりました。そのためその加工をしていました。穴位置を正確にするため角パイプの上下に同時穴を開けました。穴開け中に角パイプがずれないように気を付けて作業しました。 (千葉 到君:電子機械工学科2年)
カテゴリー: レスコン
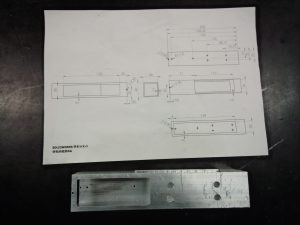
加工ミスと今後の対策
加工した部品で穴の位置を間違えてしまいました。原因は、構造を正確に理解していなかった事です。これからは、図面をよく確認するようにします。また、構造のイメージを考えて作業しようと思います。(千葉 到君:電子機械工学科2年)

カテゴリー: レスコン
ベルトコンベア動作確認
Eリングは他のメンバーもまだ使ったことが無かった部品だったのでどこまで精度よく加工できるか不安でしたが、ある程度精度よくでき、ベルトコンベアも想定内の動きをしてくれたのでよかったです。今後はベルトコンベアと同時進行で設計していた3号機の子機の設計図を作り、どんどん加工をしていこうと思います。(山田秦也君:電子機械工学科1年)
カテゴリー: レスコン
ベルトコンベア完成
メンバーに加工を手伝ってもらい、1号機に搭載するベルトコンベア本体が完成しました。
前回の夏に作ったベルトコンベアからの大きな改善点として、
- ベルコンの回転軸の本数が少なく軸同士の間隔が広くなってしまい、ダミヤンが間にはまって奥までうまく移動できなかったので軸数を5→7本に変更
- 組み立て時に一つ一つ軸にセットカラーを取り付けて位置調整する手間が大変だったので、軸の固定方法をセットカラーからEリングにする
などを行いました。Eリングは他のメンバーもまだ使ったことが無かった部品だったのでどこまで精度よく加工できるか不安でしたが、ある程度精度よくでき、ベルトコンベアも想定内の動きをしてくれたのでよかったです。今後はベルトコンベアと同時進行で設計していた3号機の子機の設計図を作り、どんどん加工をしていこうと思います。(山田秦也君:電子機械工学科1年)

カテゴリー: レスコン
加工の作業2
先週から続いて加工の作業をしました。主に、3号機のアームや子機のジャッキの部品加工をしました。加工中に部品を1枚の板から、2つ同時に作る方法を思いつきました。来週も、加工をやる予定です。(千葉 到君:電子機械工学科1年)
カテゴリー: レスコン