






-
リンク
「プロジェクト」カテゴリーアーカイブ
センサ異常
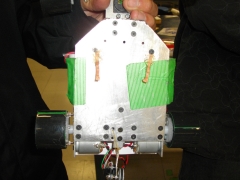
走行中にセンサ異常でマシンが停止してしまいます。安慶名先輩(電子機械工学科3年)にチェックしてもらったところ、シリコンテープとコースの摩擦で静電気が発生し、ボディに帯電しているのが原因と言われました。対策として、アースをつけて静電気を逃がします。(三原和也君:通信工学科1年)

球体型ハンド
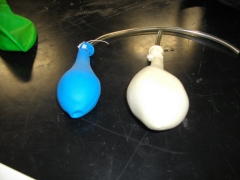
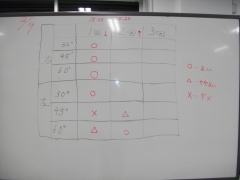
球体型ハンドの調査をしています。直系や重りをいれた時の重量を測りました。条件を変えて、ゴムの余裕は、掴みやすさ把持力をチェックしました。大きい風船を使ったほうが、対象物にフィットしやすいことが確認できました。しかし、把持力は小さい風船のほうが高いです。これらを踏まえて、実験を重ねて最終的な結果をまとめたいと思います。(中森智史君:電子機械工学科2年)

センサチェック
敵発見のセンサが正しく機能しているか、動作確認中です。ロボットの動きから、プログラミングがどう動いているのか読み取るには、習熟が必要だと感じました。(魚井成晃君:機械工学科2年)

足の設計
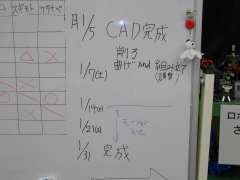
足パーツの設計を担当しています。9月末に始めたけれど、そのあと放置していたので進んでいません。もう少しで図面が出来上がります。(藤本将登君:メディアコンピュータシステム学科1年)

第23回全日本ロボット相撲大会報告
1回戦で、フェザーが飛散して反則負けになってしまいました。大会前日に調整した時に、基板が壊れてしまっていたので勝つのは難しいとは思っていました。でも、1回戦は勝てる状況だったのに、反則負けだったのが口惜しいです。今年と同じミスをしないように万全の対策で、大会に挑みたいです。

全日本大会へ、出陣!
新型のマシンで、18日(日)に東京・両国国技館で開催される第23回全日本ロボット相撲大会に出場してきます。全国の大きな舞台で、強豪マシンと戦えるのが楽しみです。全力を尽くしてきます。(池田紘彰君:電子機械工学科1年)

