



-
リンク
「プロジェクト」カテゴリーアーカイブ
定例ミーティング
レスコンロボットが形になりつつあるので、ミーティングでも具体的に質問やするどい指摘がたくさん出て活発なミーティングになりました。


入部先生からのメッセージ
新学期が始まり、忙しいと思います。連休中に集中作業に入ります。
みんな、怪我がないように作業してください。
機体を組立、基板を積んでプログラムを書いたからといって、すぐに動くわけではありません。
どんな順番で動作テストをしていくのかは、予め考えておきましょう。
センサーの動作チェック、駆動機構のチェック、ハンドのチェック・・・。各ユニット毎に細かく分類してチェックした後、全体の動作確認をする方が合理的です。
せっかくロボットをイチから設計したのであれば、「@月@日 センサチェック」等、記録を残しておきましょう。
見つかった問題点、解決方法なども記録しておけば、将来後輩に教える役にたちます。記録してあれば、自分の記憶を補完できます。
そして、勉強もしてください。ロボットに入れ込みすぎて、留年しては困ります。勉強と活動のバランスを考えて、両方頑張りましょう。
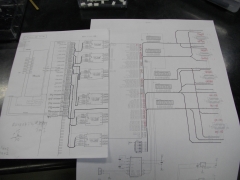
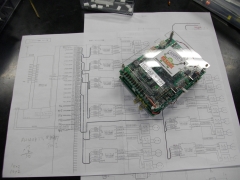
B2号機:TPIPボード活用
TPIPボードはモータを10個までしか制御できません。B2号機は、24個の駆動部があるので、TPIPボードのシリアルを使って動かすように回路を製作中です。(中村祐一君:電子機械工学科2年)
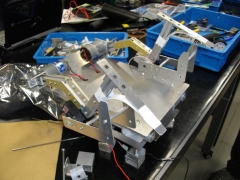
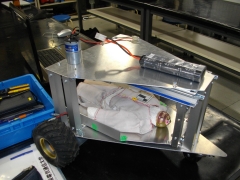
B1号機:スライド機構
今週は、ベッドにつけるアームの部品製作をしました。ベッドとアームがスライドして出てきて、ダミヤンを収納します。来週は救助機構の製作にはいります。(廣澤勝成君:電子機械工学科3年)

技術講習会
5月14日から技術講習会を行います。上級生が講師となり、新メンバーに講習し、安全な機械加工を行えるように指導します。機械加工を覚えたい、ロボット製作したい人は、ぜひ自由工房に来てください!

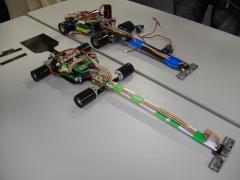
S4号機:配線終了
配線が完了しました。電気が各部品に正常に流れていることは確認しました。回路はできているので、接続して組み立てたら自走するハズです。(上殿泰生君:機械工学科2年)

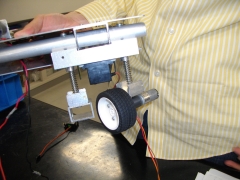
S3号機:丸棒が来た
ようやく丸棒が来たので、加工して装着しました。来週から駆動部の製作にかかります。タイヤひとつひとつが確実に制御できるように部品を作成していきます。(中森智史君:電子機械工学科2年)