







-
リンク
「ロボット相撲」カテゴリーアーカイブ
新マシン製作
来年度中心になって活動するメンバーで、新マシン製作をします。新メンバーが入ってくるまでに、自分たちの技量とチームワークを磨きます。
フライス盤担当は、石川聖卓君(電子機械工学科1年)と山中拓也君(電子機械工学科2年)、旋盤担当は大林尭史君(電気電子工学科2年)、手加工担当は魚井成晃君(機械工学科1年)です。


坂道検出センサ
ラインセンサを使って、坂道を検出する工夫をしました。坂に入ると、センサに接地しているフレームの角度が変わるので、センサ値が変化します。(中井智貴君:電子機械工学科1年)
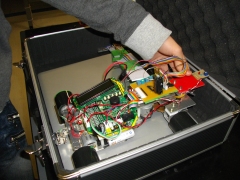
センサプログラム
先週まで出ていたクランクとレーンチェンジ時のセンサの読みミスを解消しました。レーンチェンジでは、まだミスが出ています。クランクはセンサの読みとりはOKですが、終了条件が読めていないので引き続きプログラムを見直します。(中森智史君:電子機械工学科1年)


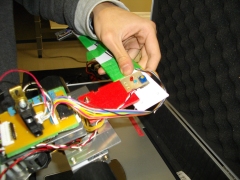
重量級対策マシン
重量級対策のブレードをマシンに取り付けて、動作確認中です。ダミーの重量級マシンを用意して、確実にすくいあげることができるかチェックしました。(畠中一輝さん)


レーンチェンジの処理
レーンチェンジのあとにハンドルがバタついています。サーボに負荷がかかっているようなので、プログラムを見直し修正します。(中井智貴君:電子機械工学科1年)


ボディパーツ要修理
中心がずれてまっすぐ走れません。車体を見たら、ボディパーツが割れているので、作りなおしの予定を立てています。(鹿島健吾君:電子機械工学科1年)

