



-
リンク
「マイコンカーラリー」カテゴリーアーカイブ
新リーダー就任
大会が終了したので、新リーダーを選出しました。前リーダーの中井智貴君(電子機械工学科3年)と、新リーダー三原和也君(通信工学科2年)から、それぞれコメントがあります。
「短い間でしたが、リーダーを勤めてました。レスコンも終わったら、先輩として彼らが上位入賞できるように指導をしていきたいです」(中井智貴君:電子機械工学科3年)
「今年は完走できなかったので、来年はベスト32位を目指します。1人では何もできないので、大西君と一緒に強力しながらプロジェクトを盛り上げて行きたいです」(三原和也君:通信工学科2年)

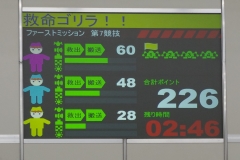
ファーストミッション終了
第12回レスキューロボットコンテストのファーストミッションが無事に終了しました。救命ゴリラ!!は、3体のダミヤンを救出搬送し、258ptで3位。ファイナルミッションへの進出を決めました。



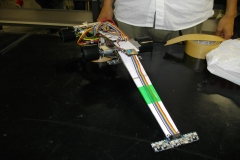
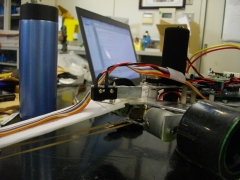
大会に向けてスタート
28日(土)に開催されるルネサスマイコンカーラリー大会出場に向けて、機体の調整中です。モータをマブチモータから、マクソンモータに換装しました。目標は、大会で秒速k3.7m出すことです。(中井智貴君:電子機械工学科3年)

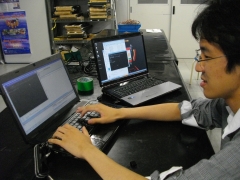
LAN
ロボットを操縦している4台PCが、メインPCに情報を送れるようなシステムを作成しています。これが完成すると画像処理を1台のマシンでできるようになります。ダミヤンの胸マーカー認識や音声認識を、メインでできるようになるため、オペレータの負担が軽減されます。(中村祐一君:電子機械工学科3年)
プログラム講習会
7月中旬に相撲プロジェクト内でプログラム講習会を実施するので、その資料を作っています。内容は相撲ロボットの基本性能と基板の働きの解説。プログラム的には、タイマー関数の使い方、デフォルトの戦術を利用、センサの処理を実習中心で進めます。(魚井成晃君:機械工学科3年)

坂道センサの配置
センサアームの根元に、坂道センサを搭載しました。坂が急坂ではないので、あまりアームが動かないので、調整が難しいです。これから坂道センサのプログラムを組んで、来週にはテストをします。(大西祐喜君:通信工学科2年)

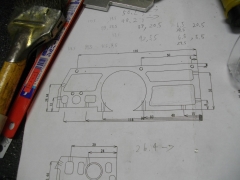
チップ完成
武器のチップを作りました。ちょっと穴位置に問題があるかもしれませんが、取り付けは可能です。試合までには、精度を上げておきたいです。(阿部史和君:メディアコンピュータシステム学科2年)

横蹴りモーション
モーション作りを初めて1週間になります。モーション作りは面白いです。今は、蹴りモーションを作っています。とりあえず横蹴り。他にもオリジナルモーションを作りこみたいです。(西川真人君:メディアコンピュータシステム学科1年)

