



-
リンク
「マイコンカーラリー」カテゴリーアーカイブ
新作ダミヤン
ダミヤンに必要な材料を購入し、スポンジを切ってベースを作りました。腕と足に重りをつけました。来週は、外装のシリコンを塗って空気が出ることを確認し組立に入ります。(廣澤勝成君:電子機械工学科2年)


定例ミーティング
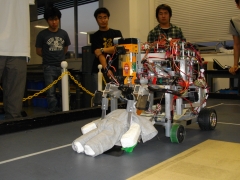
古川陽介君(制御機械工学専攻1年生)から、北海道の学会のお土産「白と黒の恋人」をいただきながらミーティングをしました。レスコンの黒チームが本番さながらに審判を置いて、3体のマシンを協働させガレキ除去、ダミヤン救助のデモンストレーションを行いました。

 高木先生からのメッセージ。
高木先生からのメッセージ。
レスコンのデモンストレーションは、今まで4年間やってきた中で、今の時期で一番スムースに動いていると思います。とてもいいですね。
競技会では、あれもこれもやりたいと考えたら、勝てません。どんな競技会でも、自分が理想とするロボットを作る人は多いです。しかし、大会ではいいロボットが優勝するわけではありません。最高の機構・理想のロボットを目指したら、たいがい優勝できません。なぜかというと、ピーキーなロボットは性能に起伏があって、安定動作ができないからです。勝利を目指すのであれば、確実に動くロボットを作って、安定したレベルで動かすことです。
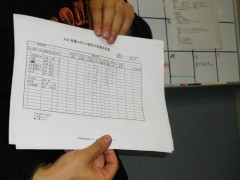
そのためには、完成したマシンを何度も練習で動かし、性能を分析することが大切です。チェック表をつくって、トラブルが起きたところが一目で分かるようにしましょう。そうすれば、どこの動作に時間が掛かるのか、トラブルが起きやすい場所などマシンの弱点が判ります。
その表を元に、トラブル回避の対策を立てましょう。今から、特別な機構を追加するのではなく、弱点を回避する方法・補強のアイデアを見つけていくことが大切です。
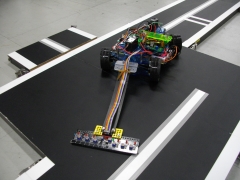
黒2号機:ダミヤン救助
ベッドをダミヤンの元へ差し出し、伸びたアームでダミヤンの脇を保持して、ベッドに引き上げます。ベッドにダミヤンが乗ったら、コンベアでロボット本体内に収容し、搬送します。(廣澤勝成君:電子機械工学科2年)

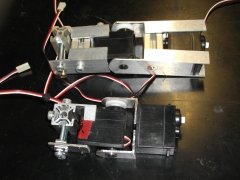
黒チーム:アームの小型化
後方アームを再設計し、製作しました。長さが70%になり、パーツ点数も減って、メンテナンス性が向上し、サーボを安全に固定しています。軽くなったので、小さなパワーで大きなモノを持ち上げられます。(浦野蒼士君:電子機械工学科2年)