マイクロマウスのセンサーLEDやフォトトランジスタ固定用のホルダーを3D造形先端加工センターで作りました、サイズもぴったりはまりました
-
リンク

マイクロマウスのセンサーLEDやフォトトランジスタ固定用のホルダーを3D造形先端加工センターで作りました、サイズもぴったりはまりました
2019年 6/2 大阪産業大学 AMC5階ラウンジ で 第39回テクフリ練習会 が開催されました。
練習会で開かれたトーナメントで新入生の白井君が小型リーグで1位 3年生吉田君が大型リーグで1位になり ダブル優勝しました。

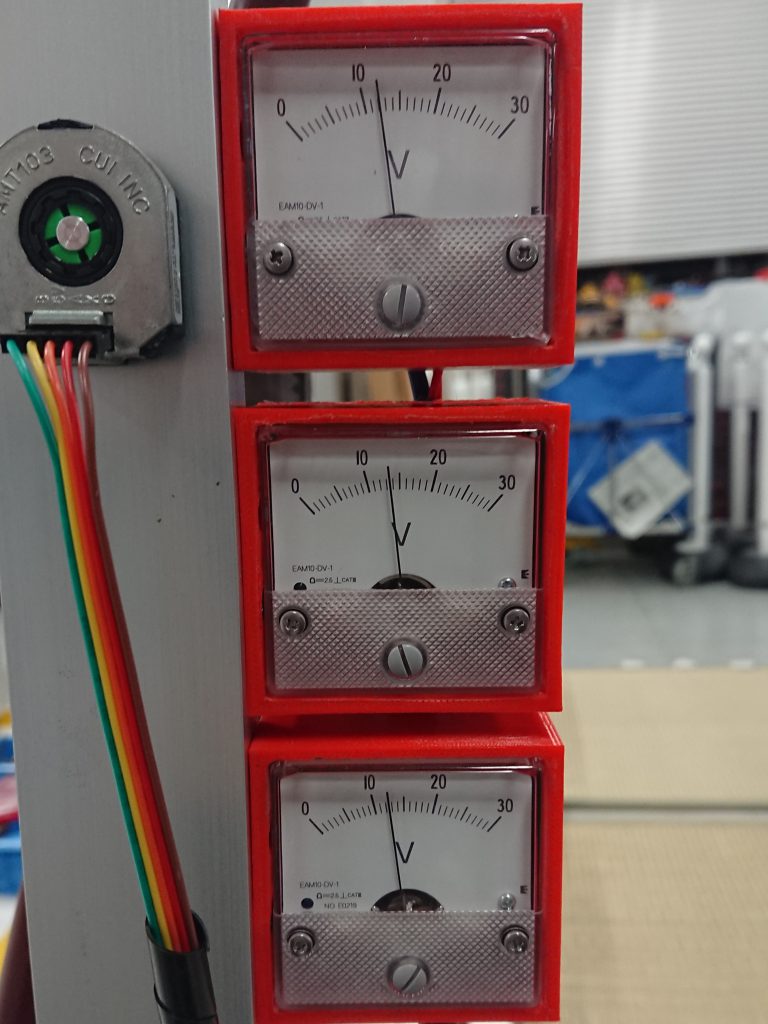
電圧計を取り付けることでロボットのバッテリー残量を容易に確認できるようにしました。取り付けた理由は、ロボットが不振な挙動をした際の状況確認をスムーズに行い、速やかな原因究明を実現するためです。
アンダーカウルの型に対するヤスリがけが完了したので、離型剤及びゲルコートの塗布を行いました、離型剤はこの後の手順であるFRPの積層をした際、型から外れやすくするためのもので、ここでの失敗は型の作り直しに繋がるので慎重に塗り込みました。

木製のシャーシにフロントの足回りを取り付けました。

正式名称はダブルコラムステアリングと言い、ホンダが開発した世界最速記録をもつ 車「S-Dream」もこの方式のステアリング機構を持ち、最小限のパーツおよびスペースで 設置できるリンク配置になっています。 ロッド部分には積極的にカーボンを使用し、以前の鉄系部品と比較して400グラムの軽量化を達成しました。

2019年 5/18神奈川県立青少年センター3階研究室1 で第2回ROBO-剣が開催されました。
ROBO-剣 (二足部門)に参加 3位決定戦で延長戦を超え判定の結果 惜しくも4位でした。

この度、株式会社コーケン様にアルマイト処理のご協賛をして頂き、アルミ削り出しホイールにカラーアルマイトを施して頂きました。
URL
http://www.koh-ken.jp/koukendenka/



アルマイト処理して頂いたホイールは、今後マシンの足回りとして大切に使わせて頂きます。この度はご支援・ご協力頂きありがとうございます!
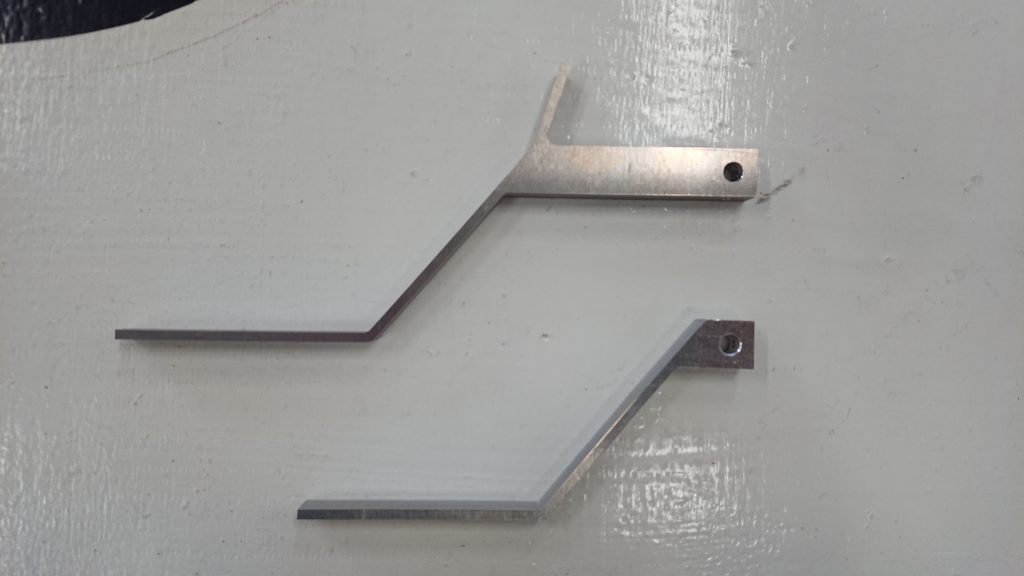
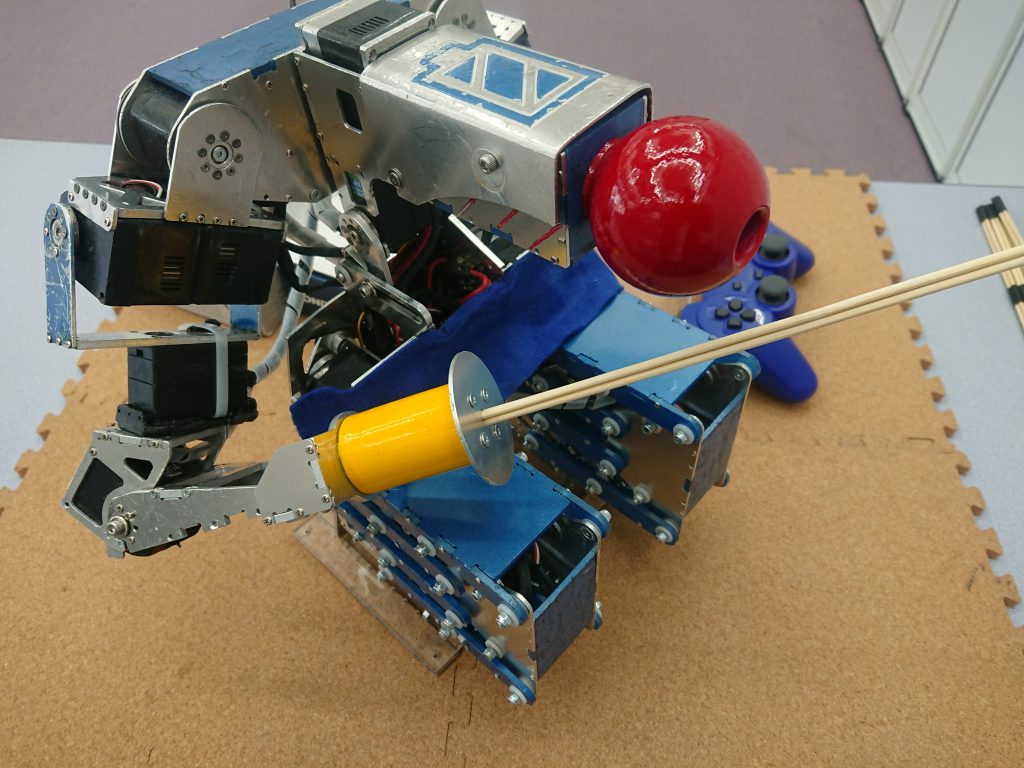
新アームが完成しました。画像の上のアームが新しい方で、下が古い方になります。見ての通り少し長くなり、上に出っ張りが付きました。この出っ張りのおかげで、投球機構のカップにスムーズに入れることができます。
左側が配線をまとめた後、右側がまとめる前です。
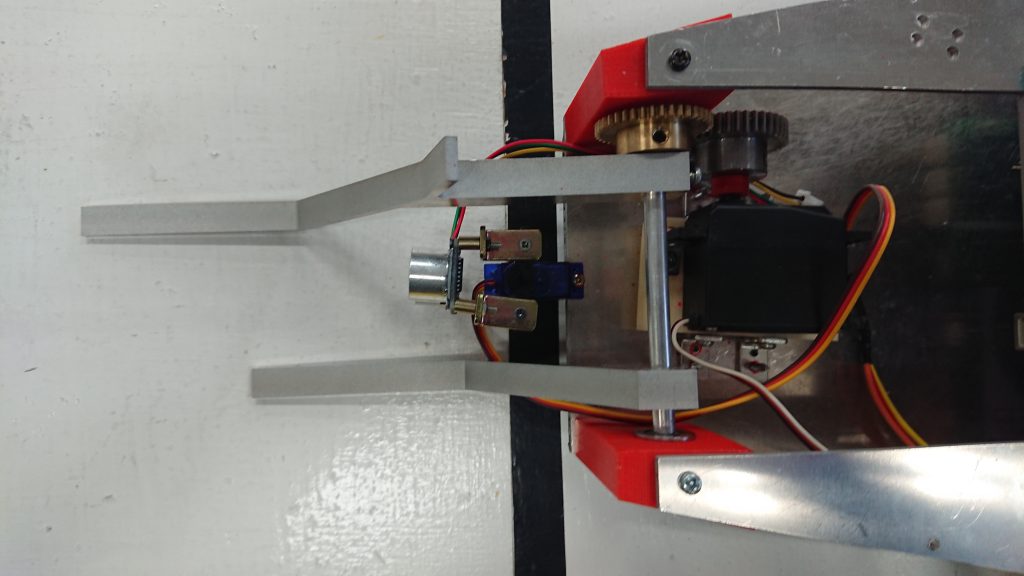
センサーやモーター等の配線を基盤にまとめ、モータードライバーの下に設置したことで、配線がスッキリしました。