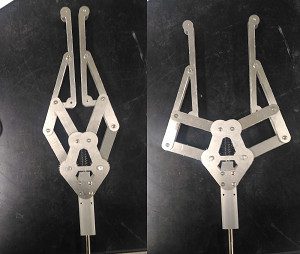
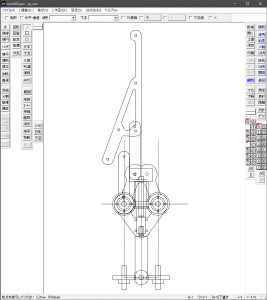
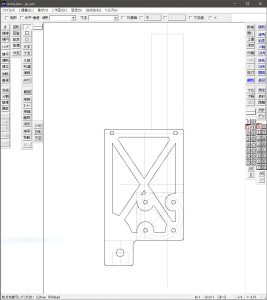
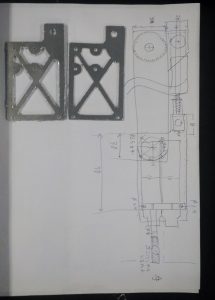
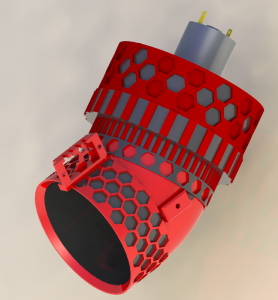
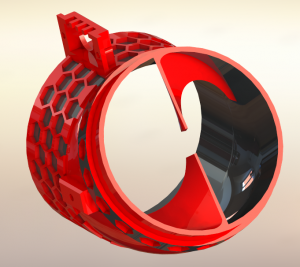
新型吸引機の設計をしました。
主に軽量化を目的とし、このような構造にしました。ただ薄くするのではなく、ハニカム構造をモチーフに削り取りました。以前の吸引機は筒の部分の振動が大きかったので、固定部分を前方に改良しました。これも3DプリンターのABS樹脂で製作してもらいます。(井堀幸祐君:電子機械工学科1年)

新型吸引機の設計をしました。
主に軽量化を目的とし、このような構造にしました。ただ薄くするのではなく、ハニカム構造をモチーフに削り取りました。以前の吸引機は筒の部分の振動が大きかったので、固定部分を前方に改良しました。これも3DプリンターのABS樹脂で製作してもらいます。(井堀幸祐君:電子機械工学科1年)
2017年3月25日、バンドー神戸青少年科学館でレスキューロボットに搭載するのTPIP(通称「レスコンボード」)講習会が開催されました。自由工房からは3名が参加しました。
6月25日に予選が開催されるレスキューロボットコンテストへ向けたTPIP講習会に参加しました。
講習会の内容は、TPIPというサンリツオートメーション製の通信機器の不備の確認と、接続の仕方及び使い方の簡易的な確認でした。
自分は昨年も参加していましたが、今年は後輩を連れての参加になりましたので、自分は去年聞いて内容を知っているので、後輩がメインでいこうと思い、あれこれすべてに手を出さずに千葉君にできるだけさせてみて、違うところを指摘したりしていました。
最後に今年から追加されるUMGという測域センサの講習を聞きました。側域センサに関しては興味をもったので触ってみようと思います。
今年以降は、去年のようにTPIPを使えるのが一人だけという事態が回避されるようにするためにも、しっかり分かっている人が一人つくようにし、後輩に技術と情報を伝えていくようにしたいです。
まず、貸与機器に不足の有無の確認がありました。確認した結果、貸与機器に不足はありませんでした。しかし、識別番号が少し合わない物がありました。
僕も、少し確認の作業をしました。しかし、今までTPIP関連をあまりやってなかったため、どのの部品がないといけないのか分かりませんでした。ちゃんと、講習で説明を聞いてどんな部品が必要か分かるようになる必要があると思いました。
次に、動作確認がありました。参加したメンバーは他に2人いて、その2人はTPIPを分かっているメンバーでした。
しかし僕は、今まで、TPIPの配線はほとんどやって居ませんでした。そのため、どのピンにどの部品を配線すればいいのか分からず、ただ呆然としているのに近い状態でした。
ただ、この講習に以前参加した先輩も初めはよく分からなかったという話を聞きました。なので、今すぐ分からなくても他のメンバーを見ながら覚える感じでやろうとしていました。
そして、少しは今まで先輩達がTPIPの設定をしている手順が分かりました。
今、製作している3号機はメカナムホイールを使っています。タイヤ1つ1つを制御します。
そのため、コンフィグでやるのには限界があります。
ゲームコントローラーの必要なボタン数が際限なく増えて現実的ではないためです。
そこで、VisualStudioのC/C++でプログラムを作ってやった方が良いと言う話になっています。
僕は、以前そのプログラムを少し作ったりしました。しかし、ちゃんと理解できてはいませんでした。
この講習はまさに、その様な内容で、どのプログラムがどのTPIPの機能に対応しているかの詳しい資料もいただけたので、とても参考になりました。
午後は、応用編でした。
まず、TPIPをコンフィグではなくVisualStudioのC/C++で動かすという内容がありました。
最後に今回初めて貸与機器に含まれた測域センサーの使用例の講習がありました。
センサーの解説は今の僕の能力ではかなり難しい内容でした。理解するのに高度なプログラムの知識が必要だったためです。
ただ、センサーをうまく活用すればロボットを思い通りに動かすことができるという話だったのでその考え方は覚えておきたいと思いました。
講習を受ける前に比べて少しはプログラムの部分が何に対応しているかが理解できたと思います。
講習で学んだTPIPの配線、通信の設定、プログラムの作り方をレスコンの活動で使いたいです。C/C++によるWindowsプログラミングの本を買って勉強しようと思います。
午前中は貸与機器の動作チェックをしながら基本的な利用方法を教えてもらいました。
僕自身は去年の予選ごろから先輩にTPIP3を教えてもらいながら使っていたので設定にそこまで苦労しなかったのですが、一緒に行っていた千葉君はこれまであまりさわっていなかったので教えながら動作チェックをしていました。
午後は応用編としてVisualstudioを用いたプログラム制御の講習がありました。プログラムに関しては初心者なので、千葉君と一緒にいろいろ試しながら取り組みました。
その後、今回から貸与機器に追加された測域センサーURGの使用方法に関する講義をしていただきました。
今年の夏はプログラム制御を頑張っていこうと思っているので、今回教えていただいたことを生かして頑張ります。
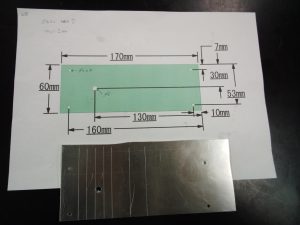
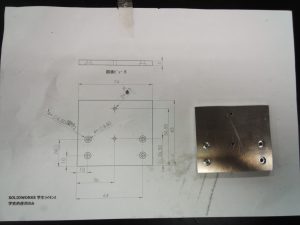
4月までにロボットをある程度完成させるという、全体の目標ができました。そこで、次々できる所から加工をしています。何回もやる事でフライス盤の使い方も、覚えられると良いと思っています。(千葉 到君:電子機械工学科1年)
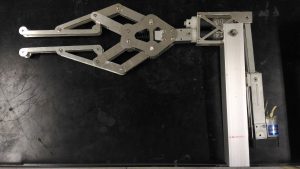
今週はロボットアームの第2間接あたりまで作りました。後はガイドレールにベースを作ってスライド機構にして完成です。来週か再来週あたりにはハードを完成させたいです。(吉田 昇君:電子機械工学科1年)

先週に続いてフライス盤の練習をしました。今回は板を2枚重ねて同時に2枚加工する練習をしました。フライス盤のデジタルの目盛の調子が悪く、手元のアナログの目盛でやったのが難しかったです。(千葉 到君:電子機械工学科1年)

第9期生の自由工房修了式&追い出しコンパを行いました。修了生へ修了証書の授与式をしました。その後参加者全員で鍋を囲みました。(二瓶悠介君:電子機械工学科1年)