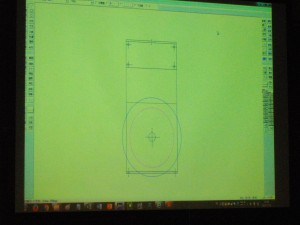
青い線がタイヤの外径、内側がギアになります。ギア比を4:1に落とす予定です。この設計では、バンププレートを乗り越えられないと指摘をうけたので、設計を見直します。(西尾昌征君:機械工学科1年)

青い線がタイヤの外径、内側がギアになります。ギア比を4:1に落とす予定です。この設計では、バンププレートを乗り越えられないと指摘をうけたので、設計を見直します。(西尾昌征君:機械工学科1年)
ロボット製作にあたって、何を目的にして作るのか要件定義をきちんとしてから、機能、要求仕様を考え、設計に落とし込みました。(上神健二君:電子機械工学科2年)


TPIPボードを搭載したコントローラーで動くシンプルなロボットを設計しています。レスコンロボットを開発する基本をここで勉強します。今は、部品の製図をしてねじ穴の位置を決めました。(松下詠一郎君:電気電子工学科1年)

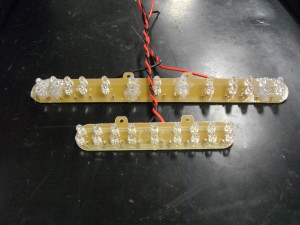
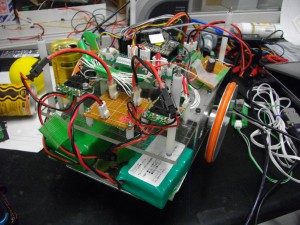
LEDの基板を変えたので、コースを撮影してデータを取りました。ラインがない状態のデータです。画像を見ると、中央のデータがはっきり取れているのがわかります。(三村祐希也君:電子機械工学科1年)

一回戦負けで敗退してきました。相手ロボットが1本目は動かなくて、待ち姿勢戦略をしていたら両者戦意なしで1本取られてしまいました。相手の旗につられて、負けてしまいました。(西原琢也君:電子機械工学科4年)


試走会で走らせてみて、広い範囲をセンシングする必要がないことが分かりました。なので、画像処理MCRのセンサー用照明を小型化しました。(三村祐希也君:電子機械工学科1年)