レスコン予選が終わったので、反省会を開きました。OBの三原和也さん(通信工学科OB)がきて、反省を来年につなげるためのミーティングを開いてくれました。


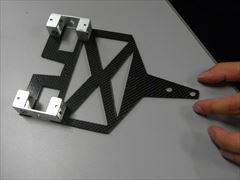
CNCでシャーシーの加工をしました。不要な部分を切り落として、軽量化しました。20%軽くなりました。来週はフライス盤でギアボックスの加工をします。(大西智之君:電子機械工学科3年)

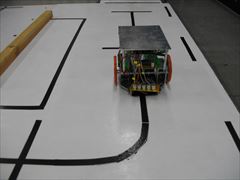
ライントレースをちゃんとやりたいので、ネットで情報を収集して、車輪の幅などを計算してプログラムをやり直しました。小1時間くらいの調整で格段にキレイにトレースできるようになりました。(上神健二君:電子機械工学科2年)
部品を一旦、全て置きました。パターンを自動で生成したら、ラインが通らないところがあるとわかったので、重心のバランスを考えながら部品の配置を再検討します。8月22日が大会なので、来週からは車体を作ります。(三村祐希也君:電子機械工学科1年)

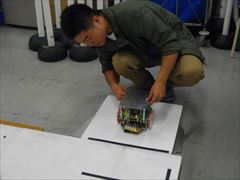
知能ロボコンで、Elephantは敗者復活戦で8点入れたものの予選敗退しました。8点しかとれなかった理由は、ラインを読み取るセンサーの1つが断線していたからです。会場でロボットをみたときにイモネジが緩んでいたので、それが原因だと思っていました。キャリーバッグにいれて会場に持っていったときに、ごろごろ転がしていたので切れたのかもしれません。(上神健二君:電子機械工学科2年)

さまざまなロボット見てきました。前日にマスターズコース部門があって、アームを使って缶やボールを運ぶロボットを見ました。知能ロボットには、オブジェクトを吸い込んだり、2台のロボットが協調して動くような技術力が高いロボットがいて、見ていて楽しかったです。次回の大会に向けて、無線制御と小型化をしたいと思いました。(橋本悠杜君:情報工学科1年)


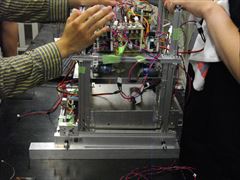
機体が完成したのですが、回路を積んで動作チェックでトラブっています。サーボモーターにつなぐ電源の端子を逆にしてしまって、基板が燃えました。(近藤 吏君:電子機械工学科3年)