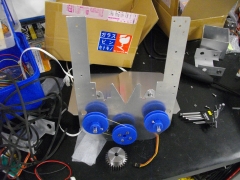
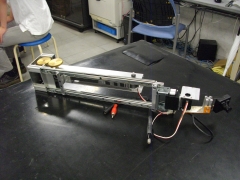
アームの機構が完成しました。来週、本体とアーム部分の結合ができます。(近藤 吏君:電子機械工学科2年)



カメラアーム用のギアボックス、スライド機構部分の加工をしました。これでアームが完成して動くようになり、動作確認もできました。来週はアーム土台作製にはいります。(近藤由規君:電子機械工学科3年)
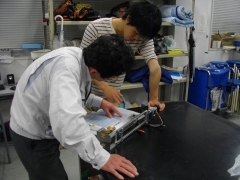
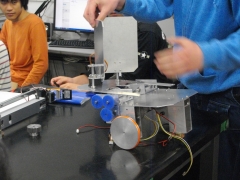
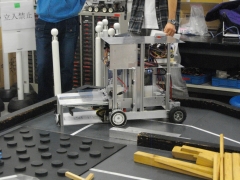
基本的機構が完成しました。ロボットを動かして、問題点や修正箇所の洗い出しをしています。旋回時に本体が揺れているようなので、状態を確認してタイヤの素材を見直すかもしれません。(清家悠太郎君:電子機械工学科3年)
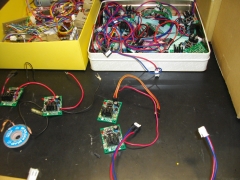
センサーの電圧値が、Arduino用電圧よりも低いので、三端子レギュレーターを使って電圧を下げます。(奥村優策君:電子機械工学科2年)


昨年使用して壊れたものや、それ以前のモータードライブ基板の中から、使えそうなものを選んで修理しています。(中村 介君:機械工学科4年) たすく