

-
リンク
「プロジェクト」カテゴリーアーカイブ
股ロール軸の拡張
横歩きができるように、股ロール軸を拡張しています。バトルの時に相手に対して、横から近づくことができるようになるので、対戦がしやすくなると思います。(大野拓美君:情報学科1年)

モーション調整
ロボファイト14に向けて、歩行モーションの調整をしています。歩いているうちに、右に旋回してしまうので、それを直しています。このあと攻撃モーションなども調整していく予定です。(矢野健太君:情報学科1年)

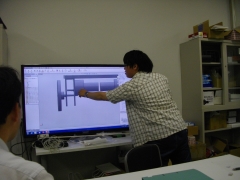
手先フレーム作製
攻撃範囲を広くするために、手先のフレームを長くしようと思っています。CADで図面を作成し、1週間くらいで完成する予定です。(矢野健太:情報学科1年)


エンコーダの部品
前々から割れていたエンコーダの部品を作り直しました。割れた部品に関しては幅を広くし、再度破損しにくいように対応しました。取り付けた結果、回転が少し良くなりました。前の部品より精度が高くなったと思います。来週以降は予備のセンサーがないので予備を作成します。サーボのギアが消耗しているので、変えたいと思います。予備のギアはひとつしかないので、再度製作したいと思います。(大西祐喜君:通信工学科3年)

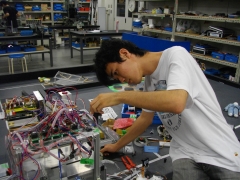
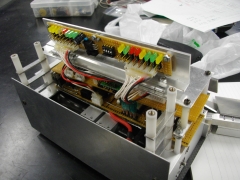
アルミ1号(仮)を無線化
ロボット「アルミ1号(仮)」を無線の受信機をつけて、コントローラで操縦できるようにしました。ようやく頭もつきました!(大野拓美君:情報学科1年)

1号機:連結持ち上げアームの部品
連結を持ち上げるためのアームを開閉するためのスライド部分の長さ足りなかったので、作り直しています。(垣内大輝君:機械工学科3年)
歯車のサイズとか……
今、本体の厚みを便宜上10mmで描いているので、2.5mmにします。図面で矛盾があるので、これから設計を詰めていきます。(廣田晋也君:電子機械工学科2年)